Устройство, принцип действия асинхронного двигателя
Асинхронный двигатель – это машина переменного тока. Слово «асинхронный» означает неодновременный. При этом имеется в виду, что у асинхронных двигателей частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
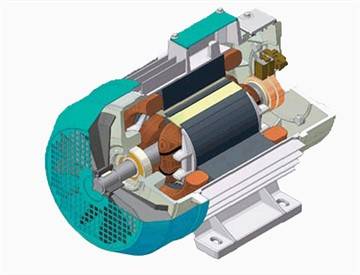
Рис.1. Устройство асинхронных двигателей
Статор – неподвижная часть машины (рис. 1, а ). Его сердечник с целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали толщиной 0,35 – 0,5 мм, изолированных друг от друга слоем лака. В пазы магнитопровода статора укладывается обмотка. В трехфазных двигателях обмотка трехфазная. Фазы обмотки могут соединяться в звезду или в треугольник в зависимости от величины напряжения сети.
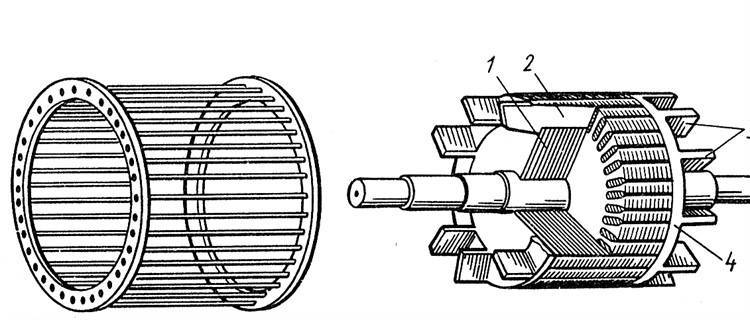
Ротор – вращающаяся часть двигателя. Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали (рис. 1, б. в ). В пазах ротора укладывают обмотку, в зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни (рис. 1, г ), соединенные с торцов кольцами из этого же материала («беличья клетка»).
У фазного ротора (см. рис. 1, в ) в пазах магнитопровода уложена трехфазная обмотка, фазы которой соединены звездой. Свободные концы фаз обмотки присоединены к трем медным контактным кольцам, насаженным на вал двигателя. Контактные кольца изолированы друг от друга и от вала. К кольцам прижаты угольные или медно-графитные щетки. Через контактные кольца и щетки в обмотку ротора можно включить трехфазный пуско-регулировочный реостат.
Преобразование электрической энергии в механическую в асинхронном двигателе осуществляется посредством вращающегося магнитного поля. Вращающееся магнитное поле это постоянный поток, вращающийся в пространстве с постоянной угловой скоростью.
Необходимыми условиями возбуждения вращающегося магнитного поля являются:
— пространственный сдвиг осей катушек статора,
— временной сдвиг токов в катушках статора.
Первое требование удовлетворяется соответствующим расположением намагничивающих катушек на магнитопроводе статора. Оси фаз обмотки смещены в пространстве на угол 120º. Второе условие обеспечивается подачей на катушки статора трехфазной системы напряжений.
При включении двигателя в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, периодические изменения которых относительно друг друга совершаются с запаздыванием на 1/3 периода.
Токи фаз обмотки создают магнитное поле, вращающееся относительно статора с частотой n1. об/мин, которая называется синхронной частотой вращения двигателя:
где f1 – частота тока сети, Гц;
р – число пар полюсов магнитного поля.
При стандартной частоте тока сети Гц частота вращения поля по формуле (1) и в зависимости от числа пар полюсов имеет следующие значения:
Вращаясь, поле пересекает проводники обмотки ротора, наводя в них ЭДС. При замкнутой обмотке ротора ЭДС вызывает токи, при взаимодействии которых с вращающимся магнитным полем возникает вращающий электромагнитный момент. Частота вращения ротора в двигательном режиме асинхронной машины всегда меньше частоты вращения поля, т.е. ротор «отстает» от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения
где n2 – частота вращения ротора, об/мин.
Для асинхронных двигателей скольжение может изменяться в пределах от 1 (пуск) до величины, близкой к 0 (холостой ход).
185.154.22.117 studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели. В этом типе двигателей единственным испытывающим трение узлом остаются коренные подшипники якоря.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.
В зависимости от числа обмоток статора асинхронный двигатель может быть:
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Коллекторные двигатели переменного тока используются в тех случаях, когда требуется получение высоких частот вращения (асинхронные электродвигатели не могут превышать скорость вращения магнитного потока в статоре – для промышленной сети 50 Гц это 3000 об/мин).
Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.
Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
Особенности
По способу взаимодействия ротора и вращающегося магнитного поля, устройства делятся на два вида – синхронные и асинхронные. В первом случае скорости вращения поля и ротора совпадают, во втором – отличаются.
Синхронная электрическая
 Установки данного типа одинаково широко применяются в роли двигателей и генераторов. Подобные машины используются на всех электростанциях. Ротор имеет собственные магнитные полюсы.
Установки данного типа одинаково широко применяются в роли двигателей и генераторов. Подобные машины используются на всех электростанциях. Ротор имеет собственные магнитные полюсы.
Ротор представляет собой электромагнит на Iпост от стороннего источника, реже — постоянный магнит. Сторонним источником Iпост. обычно выступает генератор, смонтированный на валу машины. Но в некоторых случаях используют и аккумулятор.
Вращение обусловлено взаимодействием вращающегося магнитного поля статора и собственного поля ротора. Первое увлекает за собой второе, заставляя подвижный элемент вращаться с той же скоростью (режим двигателя). Если же вращать ротор сторонней механической силой, на выводах обмотки статора получится 3-фазное напряжение (режим генератора).
Асинхронная электрическая
Данное устройство в основном используется как двигатель. В сравнении с синхронной имеет более простую конструкцию, чем и объясняется широкое распространение. Ротор собственных магнитных полюсов не имеет, поскольку его магнитное поле является наведенным (у синхронных — собственное).
 Асинхронные машины делятся на два вида:
Асинхронные машины делятся на два вида:
- коллекторные;
- бесколлекторные.
Первые более разнообразны по характеристикам, но из-за наличия такого дорогого и малонадежного узла, коим является коллектор, сфера их использования ограничена.
Бесколлекторные устройства наиболее распространены, они делятся на два вида:
- с короткозамкнутым ротором;
- с фазным ротором.
Обмотка первого представляет собой обойму из медных или алюминиевых стержней в форме беличьего колеса, тогда как тело самого элемента изготовлено из ферромагнитной стали и представляет собой сердечник.
Вместе сердечники ротора и статора образуют магнитопровод, а имеющиеся на них обмотки работают подобно трансформаторным:

- в обмотках статора при подключении его клемм к 3-фазному напряжению формируется вращающееся магнитное поле, как было описано выше;
- для ротора движущееся относительно него вращающееся магнитное поле является переменным, отчего в его обмотке, согласно закону электромагнитной индукции, наводится ЭДС и возникает ток;
- он создает в обмотке ротора магнитное поле, которое взаимодействует с полем статора. Иными словами, возникает действующая на стержни ротора амперова сила. Он начинает вращаться вслед за полем статора.
Очевидно, что скорость вращения ротора V не может быть равна аналогичному параметру поля статора V0, поскольку при таких условиях последнее уже не будет переменным для роторной обмотки.
Потому данный двигатель и называют асинхронным. Если при вращении ротор обгоняет поле статора, машина переходит в режим генератора. Разность V и V0 характеризуется коэффициентом скольжения S = (V0 – V) / V0.
Короткозамкнутый ротор
У двигателей с короткозамкнутым ротором есть три недостатка, ограничивающих сферу применения:
- небольшой пусковой момент: при активации полюсы наведенного в роторе магнитного поля находятся под полюсами вращающегося поля статора;
- высокий пусковой ток: в 5-15 раз выше рабочего;
- в случае приложения нагрузки на вал более максимального момента двигатель останавливается.
Обмотка фазного ротора устроена подобно статорной. В момент пуска к ней подключается внешнее сопротивление, отчего взаимное расположение магнитных полей подвижного и неподвижного элементов меняется — полюса одного выводятся из-под полюсов другого. Возникает высокий момент трогания (или пусковой).
Синхронные и асинхронные электродвигатели
Синхронные и асинхронные электромоторы имеют общие условия для своей работы. Для этого необходимо магнитное поле, максимальная величина которого перемещается в пространстве. Такое поле может быть создано двумя или большим числом обмоток. Обычные конструкции синхронных и асинхронных электромоторов содержат две или три обмотки.
Они размещаются на массивных ферримагнитных сердечниках, усиливающих магнитное поле. Для трёх обмоток применяется трёхфазное напряжение, для двух обмоток – двухфазное или одна фаза с фазосдвигающим конденсатором. Но с таким конденсатором к однофазной сети можно подключить и трёхфазные двигатели.
Если ротор электромотора создаёт постоянное магнитное поле, либо от постоянных магнитов, либо от встроенного в ротор источника питания постоянного тока, либо от внешнего источника питания постоянного тока через кольца со щётками такой двигатель является синхронным. В нём частота оборотов и частота напряжения источника питания одинаковы. В асинхронных двигателях используется немагнитный ротор без явно выраженных полюсов, колец со щётками, встроенных выпрямителей и комбинированных деталей из различных материалов. Исключением является синхронный гистерезисный двигатель.
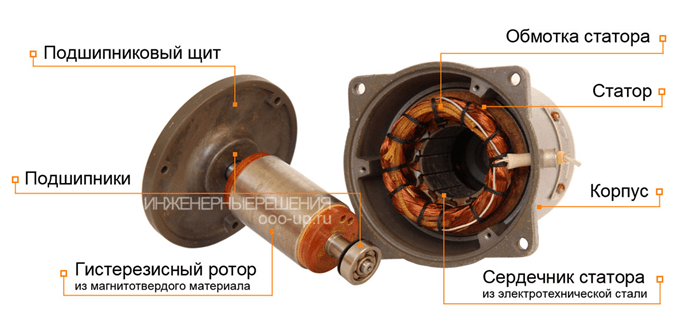
Ротор асинхронного двигателя работает как вторичная обмотка трансформатора, которая замкнута накоротко. Но ток в его роторе может возникнуть только при более медленном вращении в сравнении с магнитным полем статора. Такое различие скоростей называется скольжением. Простота конструкции и соответствующая надёжность делают асинхронный электромотор наиболее широко используемым.
Предыстория.
Якоби Борис Семенович
Уже в 1821 году, знаменитый британский ученый Майкл Фарадей продемонстрировал принцип преобразования электромагнитным полем электрической энергии в механическую энергию. Установка состояли из подвешенного провода, которых окунался в ртуть. Магнит устанавливался посередине колбы с ртутью. При замыкании цепи, провод начинал вращение вокруг магнита, демонстрируя то, что вокруг провода, эл. током, образовывалось электрическое поле.
Эту модель двигателя часто демонстрировали в школах и университетах. Данный двигатель считается самым простым видом из всего класса электродвигателей. Впоследствии он получил продолжение в виде Колеса Барлова. Однако новое устройство носило лишь демонстрационный характер, поскольку вырабатываемые им мощности были слишком малы.
Ученые и изобретатели работали над двигателем с целью использования его в производственных нуждах. Все они стремились к тому, чтобы сердечник двигателя двигался в магнитном поле вращательно-поступательно, на манер поршня в цилиндре паровой машины. Русский изобретатель Б.С. Якоби сделал все гораздо проще. Принцип работы его двигателя заключался в попеременном притяжении и отталкивании электромагнитов. Часть электромагнитов были запитаны от гальванической батареи, и направление течения тока в них не менялась, а другая часть подключалась к батарее через коммутатор, благодаря которому изменялось направление течения тока через каждый оборот. Полярность электромагнитов менялась, и каждый из подвижных электромагнитов то притягивался, то отталкивался от соответствующего ему неподвижного электромагнита. Вал приходил в движение.
электродвигатель Бориса Якоби
Изначально мощность двигателя была небольшой и составляла всего 15 Вт, после доработок, Якоби удалось довести мощность до 550 Вт.. 13 сентября 1838 году, лодка, оборудованная этим двигателем, плыла с 12 пассажирами по Неве, против течения, развивая при этом скорость в 3 км/ч. Двигатель был запитан от большой батареи, состоящей из 320 гальванических элементов. Мощность современных электрических двигателей превышает 55 кВт. По вопросом прибретения электрических двигателей смотрите здесь.
История
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в ртуть. Постоянный магнит был установлен в середине ванны со ртутью. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется на школьных уроках физики, вместо токсичной ртути используют электролит. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русско-прусский учёный Б.С. Якоби пошёл иным путём. В 1834 г. он создал первый в мире практически пригодный электродвигатель со вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б.С. Якоби писал, что его двигатель несложен и «даёт непосредственно круговое движение, которое гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось восемь раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременно притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довёл мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
В 1839 г. Якоби построил лодку с электромагнитным двигателем, который от 69 элементов Грове развивал 1 лошадиную силу и двигал лодку с 14 пассажирами по Неве против течения. Это было первое применение электромагнетизма к передвижению в больших размерах.
Частотно-регулируемый привод
В первом приближении существенных отличий между этими приводами не так и много; однако, при более детальном рассмотрении, выявляются характерные особенности приводов и различие физических принципов функционирования. Дале в статье раскрываются аспекты отличия приводов по следующим пунктам:
- характеристики двигателей, как электромеханических преобразователей
- характеристики преобразователей электрической энергии
- 4-х квадрантные приводы
- влияние на внешнюю среду
- модернизация приводов постоянного тока
Преимущества постоянного тока
- Главное преимущество электрической энергии постоянного тока – это отсутствие реактивной мощности. А это значит, что вся мощность, выработанная генератором, потребляется нагрузкой за вычетом потерь в проводах.
- Постоянный ток в отличие от переменного протекает по всему сечению проводника.
Указанные два пункта приводят к тому, что если передавать одну и ту же мощность при равных напряжениях постоянным и переменным токами, то потери мощности электроэнергии постоянным током были бы почти в два раза меньше, чем при переменном токе.
К тому же, если рассматривать такие бытовые электронные устройства как ноутбуки, компьютеры, телевизоры и т. п., то все они имеют блоки питания, преобразующие переменное напряжение 220 В (230 В) в постоянное напряжение более низкой величины. А такие преобразования связаны с частичной потерей мощности.
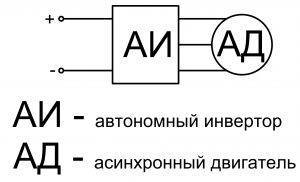 Кроме того, как было сказано ранее, трехфазный асинхронный двигатель (АД) можно подключить напрямую к сети 380 В, что вполне оправдано в том случае, когда не требуется изменять режим работы двигателя. Но если необходимо изменять частоту вращения его вала, то нужно на обмотки статора подавать напряжение, частота и амплитуда которого должны изменяться пропорционально, согласно закону Костенка. Для этого применяют трехфазные автономные инверторы (АИ), чаще всего инверторы напряжения. Такие инверторы должны получать питание от источника постоянного напряжения.
Кроме того, как было сказано ранее, трехфазный асинхронный двигатель (АД) можно подключить напрямую к сети 380 В, что вполне оправдано в том случае, когда не требуется изменять режим работы двигателя. Но если необходимо изменять частоту вращения его вала, то нужно на обмотки статора подавать напряжение, частота и амплитуда которого должны изменяться пропорционально, согласно закону Костенка. Для этого применяют трехфазные автономные инверторы (АИ), чаще всего инверторы напряжения. Такие инверторы должны получать питание от источника постоянного напряжения.
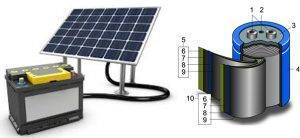 Также следует заметить, что последним временем начали очень широко применяться солнечные батареи, которые вырабатывают постоянный ток. К тому же, значительно возросла мощность аккумуляторных батарей и повысилась емкость суперконденсаторов, которые также относятся к источникам постоянного тока и с каждым днем находят все большее практическое применение.
Также следует заметить, что последним временем начали очень широко применяться солнечные батареи, которые вырабатывают постоянный ток. К тому же, значительно возросла мощность аккумуляторных батарей и повысилась емкость суперконденсаторов, которые также относятся к источникам постоянного тока и с каждым днем находят все большее практическое применение.
Двигатель переменного тока работа
Из названия следует, что особенностью данного рода электрических двигателей (ЭД) является то, что они работают на переменном токе. Если при постоянном токе электрические частицы следуют только в одном направлении, и могут в определенный момент времени менять свою интенсивность (разность потенциалов или напряжение), то у переменного тока имеются другие характеристики — такие как частота, форма и длительность. Что повлияло на конструкцию и принцип действия электродвигателей переменного тока. В статье разберём основные аспекты работы ЭД переменного тока.
Двигатель переменного тока классификация и принцип работы
Электродвигатели переменного тока это электротехнические устройства, являющиеся своеобразными преобразователями электрической энергии, в основе принципа которых которых лежат электромагнитные силы Лоренца и явление электромагнитной индукции. работающие на переменном токе. ЭД и генераторы переменного тока по принципу действия классифицируют на синхронные и асинхронные. Что бы было понятно дальнейшее объяснение хочу поведать о следующем.
Главной отличительной чертой электрических машин переменного тока является то, что электрическую энергию преобразуют в механическую или наоборот, с помощью взаимодействие магнитных полей, одно из них является вращающимся, динамическим (генерируемое при движении переменного тока, а другое поле в статическое, постоянное. Поэтому, для получения движения ротора движущееся поле должно взаимодействовать с постоянным, что и создает механическое движение вала ЭД.
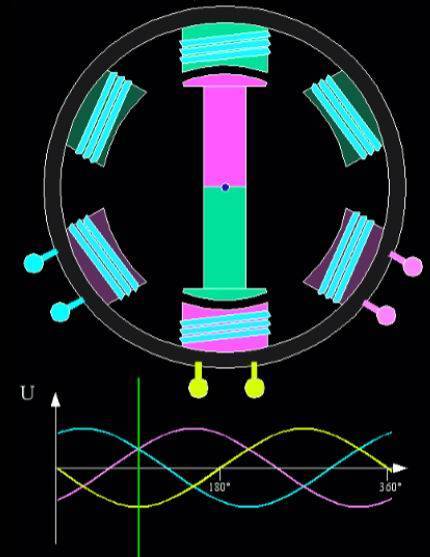
Общий принцип действия асинхронной электрической машины состоит в следующем. На статоре ЭД намотаны три обмотки, к которым подсоединены три фазы. Из курса электротехники мы знаем, что трехфазный ток это циклическое изменение величины тока и напряжения плавно перетекающее по синусойде. То есть, максимум мощности плавно перетекает из одной точки, обмотки в другую, понятно что, при этом, на противоположной стороне синусойды будет минимум мощности. Так вот при подачи трехфазного напряжения на обмотки статора асинхронного ЭД мы имеем в результате вращающееся магнитное поле, частота которого равна частоте питающей сети, в России это 50 Гц.
Из курса физики и общей электротехники мы знаем, что при движении проводника в переменное магнитное поле на его концах генерируется разность потенциалов, а если его концы подсоединить к какой нибудь цепи, то через нее, потечет ток, образующий вокруг себя свое собственное магнитное поле. Вот этот принцип работы и лежит в асинхронных электрических машинах. Внутри нее расположен короткозамкнутый ротор. Во вращающемся магнитном поле на нем появляется ЭДС и у него создается собственное магнитное поле, что и отталкивается от поля статора.
Асинхронный двигатель. Устройство и принцип работы
Работа асинхронного двигателя основана на принципах физического взаимодействия магнитного поля, появляющегося в статоре, с током, который это же поле генерирует в роторной обмотке.
У синхронных ЭД подобного отставания нет. Там поле индуктора как бы цепляется за вращающееся поле якоря, что и ведет к синхронной работе обоих магнитных полей. Если в асинхронниках статическое поле является следствием работы динамического, то в синхронниках в определённом смысле причины появления вращающегося полями и поля статического независимы друг от друга, но их взаимодействие и позволяет осуществлять работу ЭД переменного тока.
Cинхронный двигатель. Принцип работы
Синхронный двигатель – это разновидность электродвигателей, только работающих от переменного напряжения, при этом частота вращения ротора совпадает с частотой вращения магнитного поля. Именно поэтому она остается постоянной вне зависимости от нагрузки, т.к ротор синхронного двигателя – это обычный электромагнит и его, количество пар полюсов совпадает с числом пар полюсов у вращающегося магнитного поля. Поэтому взаимодействие этих полюсов обеспечивает постоянство угловой скорости, с которой крутится ротор.
Недостатки постоянного тока
Из выше изложенного следуют такие недостатки.
- Сложность повышения и снижения напряжения, то есть преобразования электроэнергии постоянного тока. В первую очередь это вызвано сложность конструкций преобразователей. Поскольку необходимы мощные полупроводниковые ключи, рассчитанные на высокое напряжение. Отсутствие которых приводит к большому числу последовательно и параллельно соединенных полупроводниковых приборов. В результате снижается надежность всего преобразователя, увеличивается стоимость и возрастают потери мощности.
- Электрические машины имеют более сложную конструкцию, поэтому менее надежны и более затратные, как в производстве, так и в эксплуатации.
- Сложности в развязке высокого и низкого напряжений.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
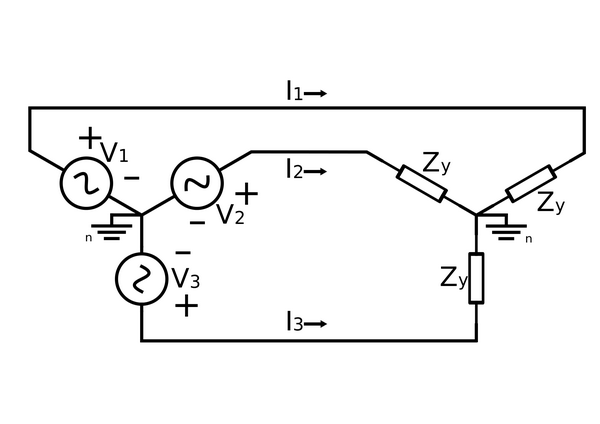
Трехфазный генератор переменного тока
Выводы: постоянный или переменный ток
Несмотря на все преимущества постоянного тока, значительная сложность, вызванная преобразованием больших мощностей, главным образом сказывается сложность повышения и понижения постоянного напряжения, сводит на нет указанные выше преимущества. Поэтому, до тех пор, пока не будут разработаны полупроводниковые ключи огромной мощности и соответствующие преобразователи на их основе, переменный ток остается вне конкуренции. К тому же сейчас уже применяются четырехквадрантные преобразователи или активные выпрямители, позволяющие скомпенсировать реактивную составляющую нагрузки, что позволяет получить коэффициент мощности, равный почти единице. Благодаря чему исключается потребление реактивной мощности.
Как вы видите, однозначного ответа на вопрос, какой ток лучше: постоянный или переменный, не существует. Следует сравнивать все преимущества и недостатки для конкретного случая.