Принцип действия
 Если у шагового двигателя на статоре имеется две пары полюсов с двумя обмотками управления, то его вращение будет зависеть от подачи напряжения на обмотку управления. При подаче сигнала на обмотку управления, которая находится на первой паре, ротор повернётся и займёт положение по ее оси. Когда на обмотке второй пары полюсов появится сигнал, ротору придётся занять положение между этими полюсами.
Если у шагового двигателя на статоре имеется две пары полюсов с двумя обмотками управления, то его вращение будет зависеть от подачи напряжения на обмотку управления. При подаче сигнала на обмотку управления, которая находится на первой паре, ротор повернётся и займёт положение по ее оси. Когда на обмотке второй пары полюсов появится сигнал, ротору придётся занять положение между этими полюсами.
При отключении сигнала на обмотке первой пары и оставшемся сигнале на обмотке управления второй пары полюсов ротор повернётся на их ось. Таким образом, при вращении он как будто будет совершать шаги, поэтому и носит такое название. Шаги двигателя (угол поворота ротора) с двумя парами полюсов будут равняться 45 градусам. Система коммутации будет четырехтактной.
Чтобы принцип работы шагового двигателя был понятен даже для чайников, необходимо обратить внимание на схему

Ротор будет занимать положение в пространстве против той пары полюсов, на обмотке которой будет подано питание. Если же питание подано две на обмотки соседних полюсов, ротор займёт положение между ними. Чем меньше значение шага двигателя, тем точнее и устойчивее его работа.
Для работы шагового двигателя необходим коммутатор. Его задачей является превращение импульсов управления определённой последовательности в прямоугольные импульсы в системе с необходимым количеством фаз.
При большой нагрузке на двигатель точность поворота ротора будет нарушена. Он будет поворачиваться с некоторым отставанием, которое является углом статической ошибки. При холостом ходе шагового двигателя значение угла статической ошибки равно нулю.
Так как скорость протекания процессов работы обратно пропорциональна сопротивлению управляющих обмоток, то для того, чтобы ускорить вращение ротора, применяются резисторы. Их присоединяют последовательно в цепь управляющих обмоток статора. Оценивают экономичность работы по основному показателю — значению мощности на входе.
Характеристики
Основные характеристики двигателя:
- номинальная мощность;
- максимальная мощность;
- максимальный ток;
- максимальное рабочее напряжение;
- максимальные обороты (или коэффициент Kv);
- сопротивление обмоток;
- угол опережения;
- режим работы;
- габаритно-массовые характеристики двигателя.
Основным показателем двигателя является его номинальная мощность, то есть мощность, вырабатываемая двигателем в течение длительного времени его работы.
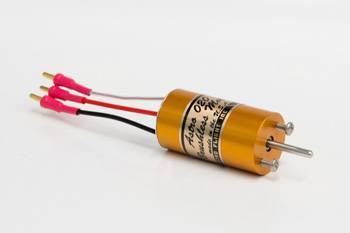 Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальный ток. Для Astro Flight 020 он равен 25 А.
Максимальное рабочее напряжение – напряжение, которое могут выдержать обмотки двигателя. Для Astro Flight 020 задан диапазон рабочих напряжений от 6 до 12 В.
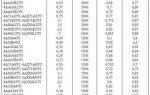
Максимальное число оборотов двигателя. Иногда в паспорте указывается коэффициент Kv – число оборотов двигателя на один вольт. Для Astro Flight 020 Kv= 2567 об/В. В этом случае максимальное число оборотов можно определить умножением этого коэффициента на максимальное рабочее напряжение.
Обычно сопротивление обмоток для двигателей составляет десятые или тысячные доли Ома. Для Astro Flight 020 R= 0,07 Ом. Это сопротивление влияет на кпд БДПТ.
Угол опережения представляет собой опережение переключения напряжений на обмотках. Оно связано с индуктивным характером сопротивления обмоток.
Режим работы может быть длительным или кратковременным. При долговременном режиме двигатель может работать длительное время. При этом выделяемое им тепло полностью рассеивается и он не перегревается. В таком режиме работают двигатели, например, в вентиляторах, конвейерах или эскалаторах. Кратковременный режим используется для таких устройств, как например, лифт, электробритва. В этих случаях двигатель работает короткое время, а затем долгое время остывает.
В паспорте на двигатель приводятся его размеры и масса. Кроме того, например, для двигателей, предназначенных для авиамоделей, приводятся посадочные размеры и диаметр вала. В частности, для двигателя Astro Flight 020 приведены следующие характеристики:
- длина равна 1,75”;
- диаметр равен 0,98”;
- диаметр вала равен 1/8”;
- вес равен 2,5 унции.
Выводы:
- В моделировании, в различных технических изделиях, в промышленности и в оборонной технике используются БДПТ, в которых вращающееся магнитное поле формируется электронной схемой.
- По своей конструкции БДПТ могут быть с внутренним (inrunner) и внешним (outrunner) расположением ротора.
- По сравнению с другими двигателями БДПТ имеют ряд преимуществ, основными из которых являются отсутствие щеток и искрения, большой кпд и высокая надежность.
Особенности использования асинхронных двигателей в однофазной цепи
 Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
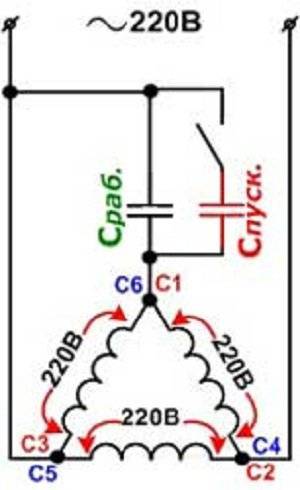
Для этого на статоре должно быть две обмотки, одна из которой является «пусковой». Ток в ней сдвигается по фазе на 90° за счет включения в цепь реактивной нагрузки. Чаще всего для этого используется конденсатор.
Запитать от бытовой розетки можно и промышленный трехфазный двигатель. Для этого в его клеммной коробке две обмотки соединяются в одну, и в эту цепь включается конденсатор. Исходя из принципа работы асинхронных электродвигателей, запитанных от однофазной цепи, следует указать, что они имеют меньший КПД и очень чувствительны к перегрузкам.
Электродвигатели этого типа легко запускаются, но частоту их вращения практически невозможно регулировать.асинхронного двигателя как генератор
Преимущества и недостатки электродвигателей
Выделим достоинства электрических агрегатов:
- высокий коэффициент полезного действия – до 95 процентов;
- компактность, малый вес;
- простота использования;
- экологичность;
- долговечность;
- создается максимальный показатель крутящего момента на любой отметке скорости;
- воздушное охлаждение;
- способны функционировать в режиме генератора;
- не нужна коробка передач;
- возможность рекуперации энергии торможения.
В качестве примера удачной разработки модели с высокими характеристиками можно привести мотор от Yasa Motors. Инженеры компании создали агрегат, который при весе 25 кг способен выдавать до 650 Нм крутящего момента.

Электродвигатель Yasa Motors
Что касается недостатков непосредственно электродвигателя, то их нет. Больше вопросов вызывает питание агрегата, что, собственно, и тормозит распространение, широкое использование технологии. Поэтому на данный момент большей популярностью пользуются гибридные авто, нежели электромобили. Благодаря такой схеме увеличивается запас хода, позволительно использовать менее мощные и дорогостоящие аккумуляторные батареи.
Свойства бесколлекторных приборов
 Бесколлекторный двигатель постоянного тока (БДПТ) существенно отличается от вентильного двигателя. Его ток в фазах выглядит трапецеидально. БДПТ устроен более просто: широтно-импульсная модуляция заменена на коммутацию 120 или 180 градусов. Главными задачами безщеточного двигателя является точное положение ротора в необходимом промежутке и высокая скорость вращения.
Бесколлекторный двигатель постоянного тока (БДПТ) существенно отличается от вентильного двигателя. Его ток в фазах выглядит трапецеидально. БДПТ устроен более просто: широтно-импульсная модуляция заменена на коммутацию 120 или 180 градусов. Главными задачами безщеточного двигателя является точное положение ротора в необходимом промежутке и высокая скорость вращения.
Конструкция может быть двух видов: с магнитами на подвижной части (якоре) или неподвижной (статоре). В устройствах автоматики для охлаждения используются приводы с конструкцией магнитов на якоре. Характерной их особенностью является быстрое достижение высоких оборотов.
 В системах оборудования для медицины распространено размещение магнитов на статоре. Эти микромашины называются высокомоментными двигателями. Скорость вращения у них не столь велика, но из-за отсутствия обмотки возбуждения и наличия постоянных магнитов они неплохо справляются с работой при перегрузках и сохраняют точность позиции в пространстве.
В системах оборудования для медицины распространено размещение магнитов на статоре. Эти микромашины называются высокомоментными двигателями. Скорость вращения у них не столь велика, но из-за отсутствия обмотки возбуждения и наличия постоянных магнитов они неплохо справляются с работой при перегрузках и сохраняют точность позиции в пространстве.
Сигнал на обмотки таких электромашин будет поступать от драйвера, задачей которого является управление вращающим моментом. Для того чтобы якорь повернулся на определённый угол, необходимо подать на нужные обмотки напряжение. Плавность вращения сохранить не удастся, но высокой скорости вращения добиться можно.
Разница между коллекторными и бесколлекторными двигателями состоит как в строении, так и в процессе работы. В контроллере коллекторные двигатели не нуждаются, а вот работа бесщеточного мотора без его участия недопустима. Достоинства бесщеточных двигателей:
- возможность работы в условиях с различными характеристиками окружающей среды;
- длительный срок использования;
- надёжность в работе.
 Недостатком является стоимость. Она довольно высока из-за наличия в строении полупроводникового коммутатора, постоянного магнита и чувствительных элементов.
Недостатком является стоимость. Она довольно высока из-за наличия в строении полупроводникового коммутатора, постоянного магнита и чувствительных элементов.
Собрать вентильный или ДПТ своими руками — дело неблагодарное. Материалы, сложность работы и потраченное время будут стоить гораздо дороже, нежели потраченные средства на покупку двигателя заводского изготовления. Но надёжность и безопасность тоже будут в несколько раз выше.
Подбор этих электромашин необходимо проводить, опираясь на характеристики драйверов с каналами широтно-импульсной модуляции:
- предельное напряжение при длительном использовании;
- максимальная скорость вращения;
- допустимая сила тока;
- частота тока (обыкновенные устройства 7—8 кГц, более усовершенствованные модели — 16—32 кГц).
 Главными звеньями при управлении бесколлекторным двигателем являются датчики положения. Сигнал с них передаётся на контроллер, и вследствие этого происходят переключения. Но возможна работа этих устройств и без датчиков. В этом случае играет роль перепад напряжения на обмотке, которая в определённый момент является нерабочей.
Главными звеньями при управлении бесколлекторным двигателем являются датчики положения. Сигнал с них передаётся на контроллер, и вследствие этого происходят переключения. Но возможна работа этих устройств и без датчиков. В этом случае играет роль перепад напряжения на обмотке, которая в определённый момент является нерабочей.
По количеству фаз многие моторы являются трехфазными, и для управления ими необходим дополнительный узел в устройстве — выпрямитель постоянного тока в трехфазный импульсный. Управление трехфазным бесщеточным двигателем постоянного тока также вызывает некоторые сложности из-за параллельного контроля нескольких параметров. Поскольку электрические машины устройства обратимые, то бесколлекторный мотор можно подключить как генератор.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Бесколлекторный двигатель в компьютерном дисководе
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Что положено в основу
Вскоре после того как было обнаружено взаимодействие магнита и проводника с электрическим током, исследователи догадались усилить электромагнитное поле, создаваемое проводником, придав последнему специальную форму. Так появился виток и рамка как разновидность витка. Рамка в поле постоянного магнита обнаружила свойство стремиться занимать только одно положение. Она всегда устанавливается своей плоскостью поперек силовых линий магнита. Если рамка может вращаться на оси, то при наличии тока она будет поворачиваться вокруг этой оси до тех пор, пока не станет поперек силовых линий магнита.
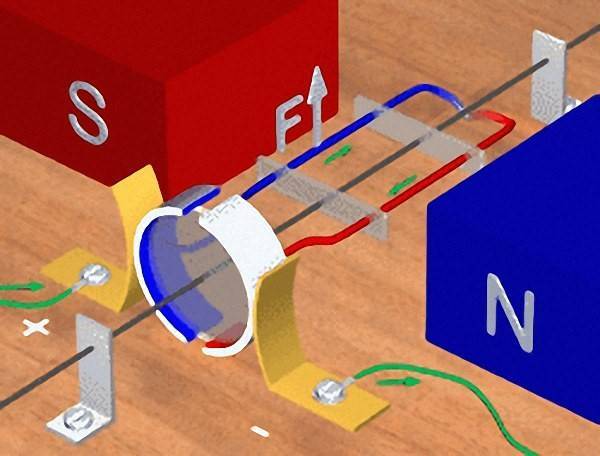
Рамка с током в поле постоянного магнита
В процессе поворота ток в рамке должен течь непрерывно. До недавних пор, пока не появились полупроводниковые приборы достаточной мощности, единственным решением этого были скользящие контакты — щетки. Они скользят по контактам рамки, которые в виде пластин размещаются на поверхности цилиндра, расположенного коаксиально с рамкой. Коллектор — так называется этот цилиндр с контактами. Чтобы получить непрерывное вращение несколько рамок, и коллектор располагают на общей оси. Тогда станет возможно преодолеть устойчивое состояние каждой рамки в ее крайнем положении.
Когда рамок становится достаточно много, коллекторная сборка контактов получается все более многочисленной, а контакты узкими, в результате чего количество их увеличивается на 2 с каждой новой рамкой. Посчитав количество пластин и разделив полученное число на 2, можно узнать количество рамок в конструкциях движков. Чтобы взаимодействие рамки с магнитом в электродвигателях получалось наиболее эффективным, все внутреннее пространство заполняется металлом — ферромагнетиком. Таким способом получаются роторы, которыми снабжены электродвигатели постоянного тока.