Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
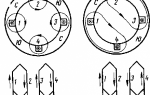
Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
Устройство синхронного двигателя

Синхронный и асинхронный двигатель
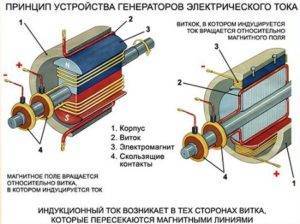
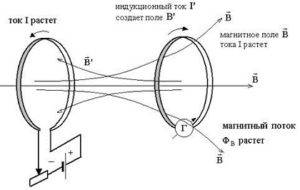
Генератор переменного тока: принцип работы
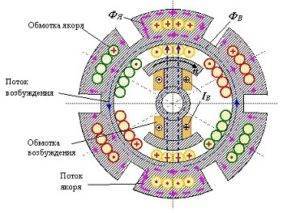
Схема синхронного генератора
Двигатель постоянного тока

Асинхронный двигатель
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Материалы по теме:
- Что такое ротор и статор
- Как передается электроэнергия на расстояния без проводов
- Что такое частотный преобразователь
Опубликовано:
30.05.2019
Обновлено: 31.05.2019
Виды
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
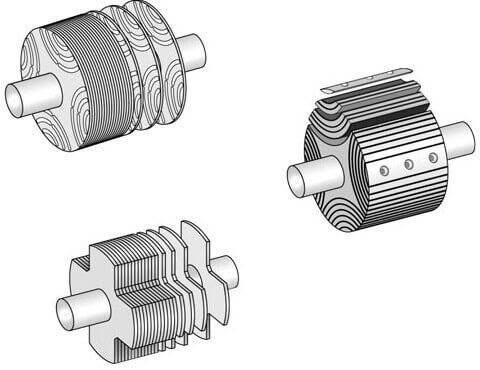
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Снятие нагрузочной характеристики синхронного двигателя.
Нагрузочная или U-образная характеристика h=f(h) представляет зависимость тока статора от тока возбуждения при неизменном моменте сопротивления. U-образную характеристику рекомендуется снимать при наладке всех синхронных двигателей, так как она показывает, какие факторы могут влиять на коэффициент мощности сети, дает представление о запасе устойчивости двигателя, позволяет уточнить сопротивления реостата возбуждения, выбрать пусковое его положение, а в схеме автоматической управления — настроить параметры регулятора.
Характеристика снимается при рабочей схеме (например, по рис. 3-15,а) путем изменения тока возбуждения возбудителя (ОВВ) или регулируемого параметра иного источника питания возбуждения синхронного двигателя.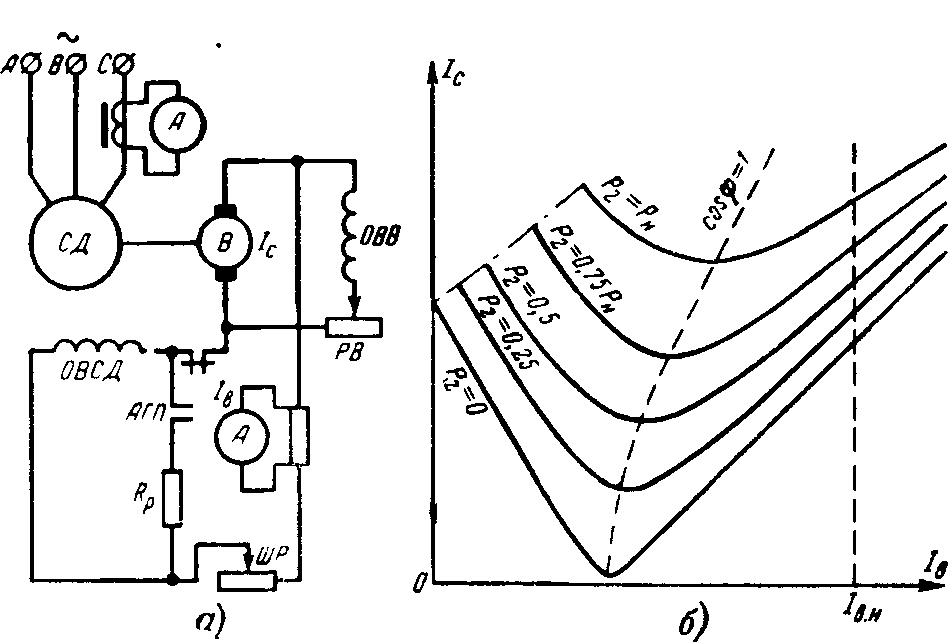 Рис. 3-15. Снятие нагрузочной U-образной характеристики синхронного двигателя.
Рис. 3-15. Снятие нагрузочной U-образной характеристики синхронного двигателя.
а —схема; б — U-образные характеристики; Iс—ток статора; Iв — ток обмотки возбуждения; P2 — мощность на валу. В начале опыта ток статора (яри повышении возбуждения) плавно поднимается до 110—125% номинального. С этого момента, не допуская длительного протекания повышенных токов статора и ротора, начинают запись показаний.
Ток возбуждения синхронного двигателя Iв (рис. 3-15,б) снижается ступенями до тех пор, пока ток статора Iс не достигнет минимального значения. При отсутствии нагрузки на валу двигателя (кривая P2=0) мы получаем правую ветвь характеристики, соответствующую работе синхронного двигателя в качестве компенсатора с опережающим (емкостным) cos φ. В данном режиме двигатель может оставаться длительно, так как способствует повышению напряжения сети и сам работ тает устойчиво.
Левая ветвь характеристики снимается путем дальнейшего понижения возбуждения; при этом ток статора возрастает, а из сети поступает реактивная мощность.
Во избежание выпадания из синхронизма при снятии левой ветви характеристики ток статора повышается только до 60—80% номинального значения. Аналогично описанному выше снимаются U-образные характеристики под нагрузкой.
Процессы, происходящие в синхронном двигателе при изменении возбуждения, удобно пояснить с помощью векторной диаграммы.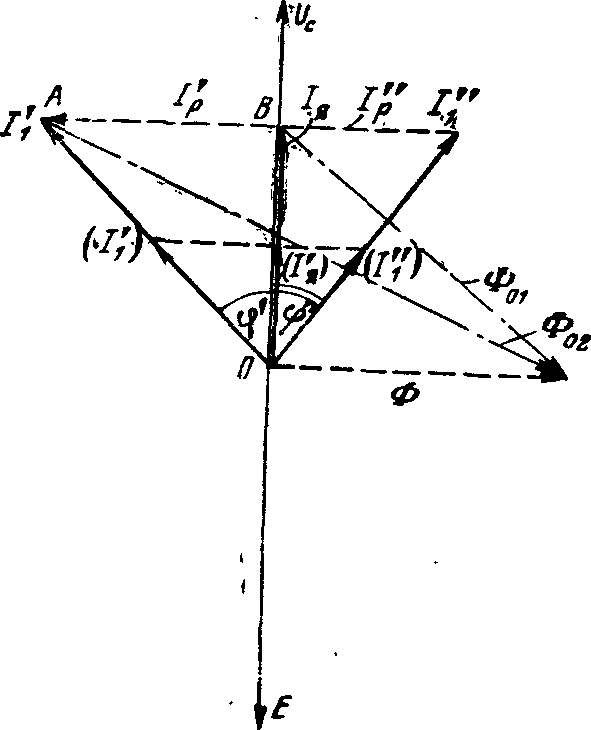 Рис. 3-16. Векторная диаграмма синхронного двигатели.
Рис. 3-16. Векторная диаграмма синхронного двигатели.
Отложим по вертикали (рис. 3-16) вектор напряжения сети Uc. Если момент сопротивления нагрузки постоянный Мс = const, то при увеличении или уменьшении возбуждения активная составляющая тока статора будет оставаться неизменной. На диаграмме показано изменение тока статора от значения I’1 соответствующего опережающему cos φ’=0,7, до значения I»1 при отстающем cos φ»=0,8. Реактивные составляющие тока представлены векторами I’р, I»р. Уменьшение момента нагрузки приводит к снижению активной составляющей тока Iя (например, до величины I’я).
Пусть момент нагрузки равен нулю и реактивная составляющая тока также равна нулю. В этом случае ток статора можно считать равным нулю и э. д. с. двигателя Е будет равна и противоположно направлена напряжению сети Uc. Магнитный поток, создающий э. д. с. Е, может быть выражен (в относительных величинах в масштабе тока) вектором Ф. Если увеличивать момент нагрузки, одновременно поддерживая cos φ= 1, до тех пор, пока ток статора не достигнет величины Iя, то результирующий магнитный поток двигателя возрастет до значения, определяемого вектором Φ01. Увеличивая возбуждение двигателя при неизменном моменте нагрузки, соответствующем активному току Ia, мы повышаем реактивную составляющую тока; ток статора I постепенно возрастает до величины I’ (при cos φ=0,7), а магнитный поток — до величины Ф02·
- Назад
- Вперёд
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.