Импульсные источники питания
Импульсные источники питания (ИИП) также могут использовать ШИМ, хотя существуют и другие методы. Добавление схем, которые используют накопленную энергию в катушках индуктивности и конденсаторах, после основных переключающих компонентов может значительно повысить эффективность этих устройств, в некоторых случаях превышая 90%. Ниже приведен пример такой схемы.
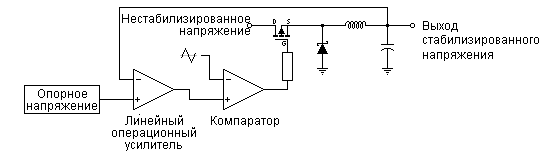 Рисунок 5 – Пример импульсного источника питания, использующего ШИМ
Рисунок 5 – Пример импульсного источника питания, использующего ШИМ
Эффективность в этом случае измеряется как мощность. Если у вас есть импульсный источник питания с КПД 90%, и он преобразует 12 В постоянного напряжения в 5 В постоянного напряжения с током 10 ампер, то на стороне 12 В он будет потреблять ток примерно 4,6 А. 10% (5 Вт) будут выделяться в виде тепла. Будучи немного шумнее, этот тип стабилизаторов будет работать намного холоднее, чем его линейный аналог.
ШИМ – широтно-импульсная модуляция
Широтно-импульсная модуляция применяется в технике для преобразования переменного напряжения в постоянное, с изменением его среднего значения (Ud)
Управление средним значением напряжения происходит путем изменения скважности импульсов
Скважность – это отношение одного периода, к времени действия (длительности) импульса в нем. В англоязычной литературе часто встречается понятие коэффициент заполнения, который обратно пропорционален скважности
Формула скважности:
где T – длительность периода, с;
t – время действия импульса (длительность), с;
D – коэффициент заполнения.
То есть, не смотря на то, что скважность и коэффициент заполнения могут использоваться в одинаковом контексте, физический смысл их отличается. Эти величины безразмерны
Коэффициент заполнения обычно отображают в процентах (%).
Рисунок 1 – Скважность импульсов
На приведенном выше рисунке изображены импульсы, которые возникают с определенной периодичностью
Длительность импульса равна ¼ периода Т, это означает, что коэффициент заполнения равен 25%, а скважность – 4. Специфическое название имеется у набора импульсов c коэффициентом заполнения – 50%, такой сигнал называется меандр
Существуют цифровые и аналоговые ШИМ. Принцип их работы остается одинаковым вне зависимости от исполнения и заключается в сравнении двух видов сигналов:
Uоп – опорное (пилообразное, треугольное) напряжение;
Uупр – входное постоянное напряжение.
Cигналы поступают на компаратор, где они сравниваются, а при их пересечении возникает / исчезает (или становится отрицательным) сигнал на выходе ШИМ.
Выходное напряжение Uвых ШИМ имеет вид импульсов, изменяя их длительность, мы регулируем среднее значение напряжения (Ud) на выходе ШИМ:
Рисунок 2 – Скважность сигнала при однополярной ШИМ
Однополярная модуляция означает, что происходит формирование импульсов только положительной величины и имеет место нулевое значение напряжения. Осуществить такую модуляцию в некоторых схемах невозможно, преимущество однополярной модуляции: малое амплитудное значение высокочастотных гармоник.
В двухполярной модуляции вместо нулевого длительного напряжения формируется отрицательное напряжение, она проиллюстрирована на рисунке 4.
Преимущество использования ШИМ — это легкость изменения величины напряжения при минимальных потерях. Конечно же, можно, применять делитель напряжения, но его работа основана на применении резисторов, а на них происходит рассеивание энергии, что в свою очередь вызывает нагрев и неэкономичность (преобразование электрической энергии в тепловую).
Работа широтно-импульсного преобразователя реализуется с помощью полупроводниковых приборов – транзисторов. Максимальные потери на транзисторах бывают при их полуоткрытом состоянии. Поэтому используют два крайних положения: полностью открыты или закрыты, тогда потери минимальны. Частота срабатывания транзисторов очень большая, то есть переходные состояния имеют мало времени и потери, фактически, сводятся к нулю.
ШИМ нашел широкое применение как регулятор оборотов двигателей постоянного тока (ДПТ).
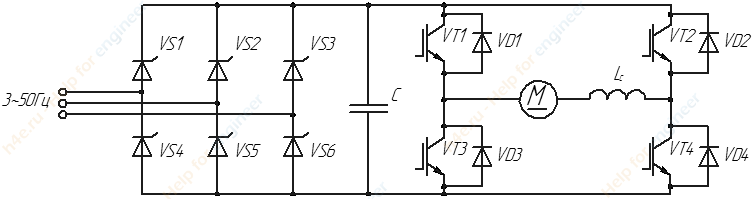
Рисунок 3 – Схема ШИМ регулятора для ДПТ
Схема ШИМ управления двигателя постоянного тока состоит из тиристорного преобразователя VS1÷VS6, сглаживающего конденсатора С. Транзисторы VT1÷VT4 реализуют подачу импульсного напряжения на двигатель постоянного тока М. С помощью обратных диодов VD1÷VD4, энергия будет отдаваться в сеть при торможении двигателя. Наличие в данной схеме четырех транзисторов дает возможность работы ДПТ во всех 4-х квадрантах механической характеристики.
Принцип работы схемы основан на двухполярной модуляции:
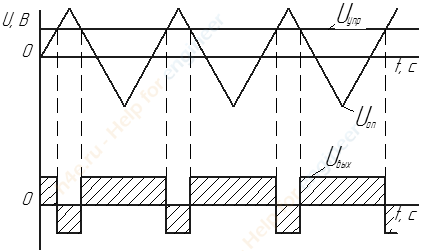
Рисунок 4 – Двухполярная широтно-импульсная модуляция
Недостаточно прав для комментирования
ШИМ – широтно-импульсная модуляция
ШИМ в преобладающем большинстве применяется для формирования сигнала синусоидальной формы. Часто ШИМ применяется для управления работой инверторного преобразователя. Инвертор предназначен для преобразования энергии постоянного тока в энергию переменного тока.
Рассмотрим простейшую схему инвертора напряжения.
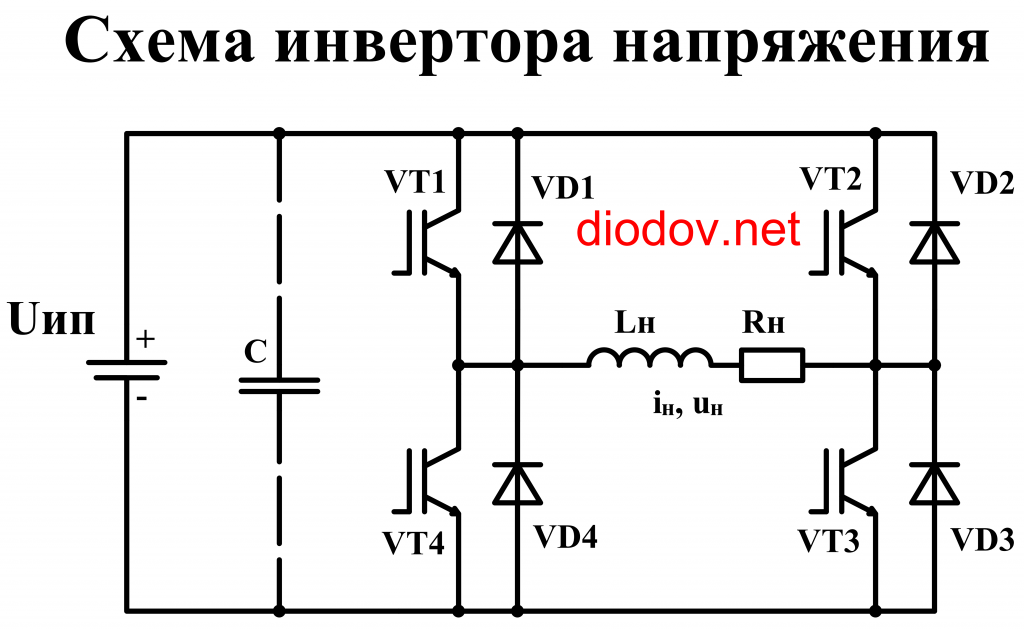
В один момент времени открывается пара транзисторов VT1 и VT3. Создается путь для протекания тока от аккумулятора GB через активно-индуктивную нагрузку RнLн. В следующий момент VT1 и VT3 заперты, а открыты диагонально противоположные транзисторы VT2 и VT4. Теперь тока протекает от аккумулятора через RнLн в противоположном направлении. Таким образом, ток на нагрузке изменяет свое направление, поэтому является переменным. Как видно, ток на нагрузке не является синусоидальным. Поэтому применяют ШИМ для получения синусоидально формы тока.

Существует несколько типов ШИМ: однополярная, двухполярная, одностороння, двухсторонняя. Здесь мы не будем останавливаться на каждом конкретном типе, а рассмотрим общий подход.
В качестве модулирующего сигнала применяется синусоида, а опорным является сигнал треугольной формы. В результате сравнивания этих сигналов формируются длительности импульсов и пауз (нижний график), которые управляют работой транзисторов VT1…VT4.
Обратите внимание, что амплитуда напряжения на нагрузке всегда равна амплитуде источника питания. Также остается неизменным период следования импульсов
Изменяется лишь ширина открывающего импульса. Поэтому при подключении нагрузки ток, протекающий через нее, будет иметь синусоидальную форму (показано пунктиром на нижнем графике).
Так вот, основное отличие между ШИР и ШИМ заключается в том, что при широтно-импульсном регулировании время импульса и паузы сохраняют постоянное значение. А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.