Принцип работы нормально открытого сервопривода (без электромагнитного мотора)
Устройство сервопривода для коллектора теплого пола достаточно простое. В центральной части корпуса располагается пружинный механизм и внутренняя малая ёмкость (баллон), заполненная специальной жидкостью (чаще всего толуол).
Вокруг емкости размещается нихромовый нагревательный элемент. В рабочем режиме, при подаче электрического тока, нагревательный элемент прогревает жидкость, эта жидкость увеличиваться в объеме, расширяется. Увеличивается давление на шток. Данная часть устройства выдвигается, надавливает на шток термоклапана, который соответственно закрывается. Как только напряжение исчезает, нагревательный элемент перестает работать, жидкость постепенно начинает терять температуру, теряет объем. В конце концов, она принимает первоначальный объем, перестает давить на шток и клапан открывается.
3 привода на распределительном коллекторе теплого пола.
Таким образом, движение клапана, его открытие и закрытие происходит без электромагнитного мотора, за счет давления нагретой жидкости в баллоне (во внутренней емкости). Поэтому данный механизм по праву назван термоприводом.
Для того, чтобы клапан пришел в движение необходимо время. Нагрев жидкости составляет около 2-3 минут, следовательно, клапан закрывается не сразу после подачи электрического тока. Время нагрева жидкости зависит от особенностей нагревательного элемента и указывается в технических характеристиках производителем. Остывание происходит немного медленнее, поэтому и обратный процесс открытия клапана происходит дольше (5-15 минут).
В случае перегрева срабатывает механизм отключения питания.
Примечание! Существуют сервоприводы для коллектора теплого водяного пола, в которых отсутствует баллон с жидкостью. Его роль заменяет специальный термоэлемент, который представляет собой пластину или пружину, расширяющуюся в результате нагрева. Принцип действия расширенного термоэлемента ничем не отличается от описанного выше процесса. При нагревании или остывании термоэлемента шток приводит в движение клапан.
Внешне определить положение клапана можно по выдвигающемуся элементу (напоминающему кнопку).
Положение «кнопки» в нагретом и остывшем состоянии.
Если его положение отличается – это сигнал о неправильном подключении сервопривода.
Положение клапана можно проверить и после прикосновения к механизму – если он горячий, клапан находится в режиме «Отключен», если прохладный – клапан открыт.
Как выбрать сервопривод
Основные функции сервосистем
- Позиционирование (Positioning)
- Интерполяция (Interpolation)
- Синхронизация, электронный редуктор (Gear)
- Точное поддержание скорости вращения (шпиндель станка)
- Электронный кулачок (Cam)
- Программируемый логический контроллер.
Компоненты сервосистемы
В общем случае сервосистема (Motion Control System) может состоять из следующих устройств:
- Серводвигатель (Servo Motor) с круговым датчиком обратной связи по скорости (он же может выполнять функцию датчика положения ротора)
- Серворедуктор (Servo Gear)
- Датчик положения исполнительного механизма (например, линейный датчик координаты оси подач)
- Сервопривод (Servo Drive)
- Сервоконтроллер (Motion Controller)
- Операторский интерфейс (HMI).
Варианты аппаратно-программной реализации сервосистемы
-
Сервосистема на базе ПЛК (PLC-based Motion Control)
- Функциональный модуль управления перемещением добавляется в корзину расширения ПЛК
- Автономный сервоконтроллер
-
Сервосистема на базе ПК (PC-based Motion Control)
- Специальный софт Motion Control для планшетного ПК с пользовательским интерфейсом (HMI)
- Programmable Automation controller (PAC) с функцией управления перемещением
-
Сервосистема на базе привода (Drive-based Motion Control)
- Преобразователь частоты со встроенным сервоконтроллером
- Опциональное программное обеспечение, которое загружается в привод и дополняет его функциями управления движением
- Опциональные платы с функциями управления движением, которые встраиваются в привод.
Типы серводвигателей
-
Синхронные
Компактные бесщёточные серводвигатели с возбуждением от постоянных магнитов (вентильные), обеспечивающие высокую динамику и точность.
-
Асинхронные
Приводы главного движения и шпинделей инструментальных станков.
- Прямой привод (Direct Drive)
Прямой привод не содержит промежуточных передаточных механизмов (шарико-винтовых пар, ремней, редукторов):
- Линейные двигатели (Linear Motors) могут поставляться вместе с профильными рельсовыми направляющими
- Моментные двигатели (Torque Motors) — синхронные многополюсные машины с возбуждением от постоянных магнитов, с жидкостным охлаждением, ротор с полым валом. Обеспечивают высокую точность и мощность на низких оборотах.
Преимущества серводвигателей
- Высокое быстродействие, динамика и точность позиционирования
- Высокомоментные
- Малоинерционные
- Большая перегрузочная способность по моменту
- Широкий диапазон регулирования
- Бесщёточные.
Преимущества линейных приводов
Отсутствие кинематических цепей для преобразования вращательного движения в линейное:
- Меньше инерционность
- Нет зазоров
- Меньше температурные и упругие деформации
- Меньше износ и снижение точности при эксплуатации
- Меньше потери на трение – выше КПД.
Точность
Микронная точность требуется в металлообрабатывающих станках с ЧПУ, а в штабелёрах достаточно и сантиметра. От точности зависит выбор серводвигателя и сервопривода.
- Точность позиционирования
- Точность поддержания скорости
- Точность поддержания момента.
Приводы и двигатели постоянного тока
Электродвигатели
vri-cnc.ru
Шаговые двигатели – дешевле. Однако сервоприводы обладают широким рядом достоинств, в том числе высокой производительностью и точностью позиционирования. Так что же выбрать?
Что такое шаговый электродвигатель
 Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговые электродвигатели широко применяются в промышленности, так как имеют высокую надежность и длительный срок службы. Главное преимущество шаговых двигателей – точность позиционирования. При подаче тока на обмотки ротор провернется строго на определенный угол.
Положительные стороны шагового двигателя
·Устойчивость в работе;
·Высокий крутящий момент на малых и нулевых скоростях;
·Быстрый старт, остановка и реверс;
·Работа под высокой нагрузкой без риска выхода из строя;
·Единственный механизм износа, влияющий на длительность эксплуатации – подшипники;
·Невысокая стоимость.
Отрицательные стороны шагового двигателя
·Высокий уровень шума;
·Возможность появления резонанса;
·Постоянный расход электроэнергии вне зависимости от нагрузки;
·Падение крутящего момента на высоких скоростях;
·Отсутствие обратной связи при позиционировании;
·Низкая пригодность к ремонту.
Что такое серводвигатель (сервопривод)
 Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Конструктивные особенности электродвигателей для сервопривода мало чем отличаются от обычных электродвигателей имеющих статор и ротор, работающих на постоянном и переменном токе, с щетками и без щеток. Особую роль здесь играет датчик обратной связи, который может быть установлен как непосредственно в самом двигателе и передавать данные о положении ротора, так и определять его позиционирование по внешним признакам. С другой стороны, работа серводвигателя немыслима без блока питания и управления (он же инвертор или сервоусилитель), который преобразует напряжение и частоту тока, подаваемого на электродвигатель, тем самым управляя его действием.
Положительные стороны серводвигателя (сервопривода)
·Высокая мощность при малых размерах;
·Высокий крутящий момент;
·Быстрый разгон и торможение;
·Постоянное и бесперебойное отслеживание положения;
·Низкий уровень шума, отсутствие вибраций и резонанса;
·Широкий диапазон скорости вращения;
·Высокая скорость разгона;
·Точное позиционирование;
·Стабильная работа в широком диапазоне скоростей;
·Малая масса и компактная конструкция;
·Низкий расход электроэнергии при малых нагрузках.
Отрицательные стороны серводвигателя (сервопривода)
·Требовательность к периодическому обслуживанию (например, с заменой щеток);
·Дорогостоящий ремонт;
·Сложность устройства (наличие датчика, блока питания и управления) и логики его работы.
·Высокая стоимость.
Сервопривод или шаговый двигатель?
Сравнивая характеристики сервопривода и шагового двигателя, следует обратить внимание, прежде всего, на их производительность и стоимость. Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей
С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей. С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла.
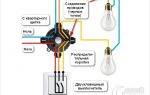
Схема подключения для «Sweep» (автоматическое вращение)
Для этого эксперимента вам надо подключить к Arduino только сервомотор.
На сервомоторе 3 контакта. Цвет контактов может отличаться в зависимости от фирмы производителя, но красный — это всегда контакт 5 В. Контакт GND (земля) может быть черным или коричневым. Оставшийся третий контакт — это сигнал, который используется для управления положением ротора сервы. Обычно он желтого или желтого цветов. Этот контакт мы подключаем к цифровому пину 9 на Arduino.
На контактах сервы предусмотрены разъемы, в которые можно установить коннекторы (провода) и соединить из макетной платой, а потом с Arduino.

Подключение сервоприводов

При подключении сервомотора в первую очередь следует убедиться в правильности коммутации питающих кабелей. Сервомоторы имеют две группы проводов. Силовые (питающие) и провода от энкодера. Питающих провода в пучке 3 штуки, они подключаются к драйверу. Провода от энкодера подключаются к COM — порту драйвера. Тип питания и его величина зависит от разновидности изделия.
Маленькие сервомашинки имеют в большинстве 3 провода. 1 провод общий, 1 провод плюсовой и 3 провод сигнальный, от датчика оборотов. Такая питающая схема распространенна для низкооборотистых маломощных сервомашинок, в конструкции которых есть редуктор.
Рекомендуется применять экранированные витые проводники для передачи управляющих сигналов. Для исключения возможности возникновения наводок электромагнитных полей не нужно размещать рядом кабеля питания и провода управления. Они должны располагаться на расстоянии не менее тридцати сантиметров.
Устройство и принцип работы
Редуктор без дополнений газовый или гидравлический, подразумевает механическое устройство для изменения угловой скорости и крутящего момента. Он работает по принципу Золотого правила, когда передаваемая вращением мощность практически не изменяется, уменьшается на КПД.
Устройство
Простейшее устройство редуктора, это зацепление из шестерни и зубчатого колеса. Крутящий момент передается через непосредственный контакт зубьев – элементов детали. Они движутся с одинаковой линейной скоростью, но разной угловой. Количество вращений шестерни и колеса за единицу времени разное, зависит от диаметров деталей и количества зубьев.
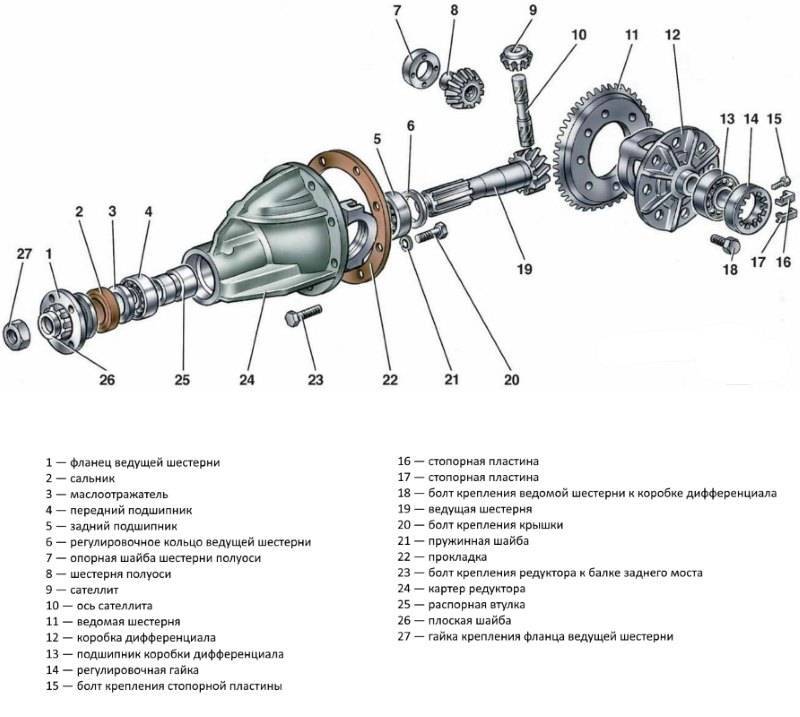
Шестерни и колеса неподвижно закреплены на валах или изготовлены совместно с ними. В корпусе может быть от одной до нескольких пар зубчатых зацеплений. На сборочном чертеже редуктора хорошо видно его устройство и составные части:
- корпус;
- крышка корпуса;
- пары в зацеплении;
- валы;
- подшипники;
- уплотнительные кольца;
- крышки.
Корпус в самом низу имеет отверстие для слива масла и приспособление контроля уровня смазочных материалов, глазок или щуп. Разъем с крышкой совпадает с плоскостью расположения осей.
На кинематической схеме редуктора схематически указаны зубчатые соединения, расположений валов и направление вращения. Также показан тип зуба, прямой или наклонный. По кинематической схеме можно определить количество ступеней, передаточное число и другие характеристики, как работает данный редуктор.
Принцип действия
Принцип работы механического редуктора основан на передаче вращательного момента от одного вала другому посредством взаимодействия зубчатых деталей, неподвижно закрепленных на них. Линейная скорость зубьев одинаковая. Она не может быть разной, поскольку контакт жесткий.
Принципом действия редуктора является давление зуба на поверхность аналогичного со смежной детали и передача при этом усилия, двигающего ведомое колесо. В результате скорость вращения уменьшается. На выходном валу создается усилие, которое способно привести в движение исполняющий механизм.
Главная пара всегда первая, быстроходная шестерня или червяк, соединенный с двигателем и соответствующее ему колесо. По ее типу определяется и весь узел. Количество ступеней равно количеству зацеплений, имеющих передаточное число больше 1.

Кроме рабочих шестерен могут использоваться паразитки – шестерни, которые не изменяют крутящий момент, только направление вращения колеса и соответственно вала, на котором оно расположено.
Маркировка
В условном обозначении редуктора имеется ряд цифр и букв, указывающих на его параметры и тип. Первым стоит указание на количество ступеней и вид зубчатого зацепления:
- цилиндрическое – Ц;
- червячное – Ч;
- коническое – К;
- глобоидное – Г;
- волновые – В;
- планетарное – П.
Комбинированные модели обозначаются несколькими буквами, начиная с первой пары:
- цилиндрически-червячные – ЦЧ;
- червячно-цилиндрические – ЧЦ;
- конически-цилиндрические – КЦ.
Количество передач данного вида указывается цифрой перед буквой.
Горизонтальное расположение считается нормой и не имеет своего обозначения. Для вертикального узла после обозначения типа передач ставится буква В. Б – означает быстроходную модель. За ним ставится условное числовое обозначение варианта сборки.
Далее указывается расстояние между осями ведущего и выходного вала, передаточное число цифрами и форма выходного вала буквенным обозначением, например, Ц – цилиндрический хвостовик, К – конический.
В маркировке может присутствовать указание на климатическое исполнение, например, для тропиков, северных районов, по какому госту выполнено.
Например: 1Ц2У-250-31,5-22-М-У2. Двухступенчатый цилиндрический с горизонтальным расположением. Межцентровое расстояние валов тихоходной ступени 250 мм, передаточное число 31,5. Вариант сборки узла 22, хвостовик по типу муфты, климатическое исполнение соответствует ГОСТ 15150-69.
Электрический привод – мотор и передаточный узел в одном корпусе, имеет несколько отличающуюся маркировку. Вначале стоит буквенное обозначение марки сборного привода, указывается скорость вращения выходного колеса, поскольку она постоянна, соединена с одним электродвигателем.
Сервопривод крышки багажника
Современные автомобили большей частью выпускаются с автоматическим открыванием и закрыванием багажника. Для этого требуется установка сервопривода. Производители применяют 2 способа, чтобы обеспечить авто подобной опцией. Надежным вариантом является пневмопривод, но он стоит дороже. Электропривод управляется несколькими способами на выбор:
- с пульта;
- кнопка на дверной панели водителя;
- ручка на крышке багажника.
Ручное открывание не всегда удобное, особенно зимой, когда замок может замерзнуть. Сервопривод багажника совмещается с замком, что дополнительно защищает авто от несанкционированного проникновения.
Устройства применяются на иномарках, но при желании их можно установить на отечественных моделях. Предпочтительно использовать привод с электродвигателем.

Есть еще устройства с магнитными пластинами, но они сложней и применяются реже.
Самыми дешевыми являются электроприборы, предназначенные только для открывания. Можно подобрать привод багажника, состоящий из электродвигателя с инерционным механизмом, отключающийся при возникновении препятствия перемещению. Дорогие модели состоят из устройства подъема и опускания крышки, доводчика запорного механизма, контроллера и датчиков.
Установка и настройка сервопривода крышки багажника производятся на заводе, но простые устройства могут быть установлены своими руками.
Подключение к Arduino
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
- красный — питание; подключается к контакту или напрямую к источнику питания
- коричневый или чёрный — земля
- жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека .
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
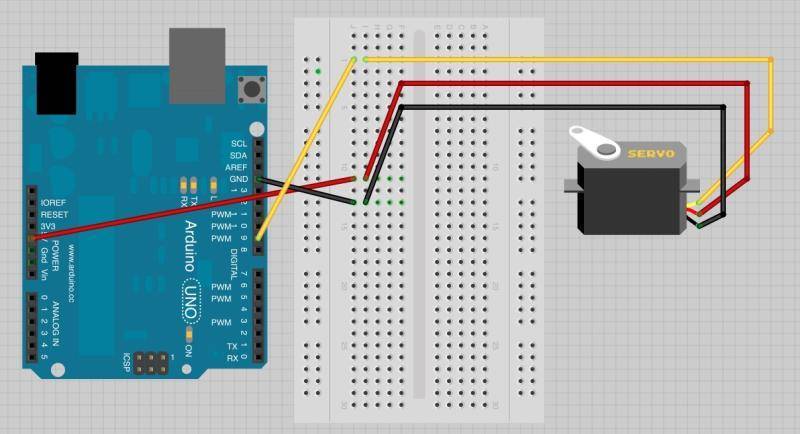
Рассмотрим на примере подключения 12V сервопривода:

Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать на 11 и 12 контактах.
Функционал библиотеки Servo
Библиотека позволяет осуществлять программное управление сервоприводами. Для этого заводится переменная типа . Управление осуществляется следующими функциями:
- — присоединяет переменную к конкретному пину. Возможны два варианта синтаксиса для этой функции: и . При этом — номер пина, к которому присоединяют сервопривод, и — длины импульсов в микросекундах, отвечающих за углы поворота 0° и 180°. По умолчанию выставляются равными 544 мкс и 2400 мкс соответственно.
- — отдаёт команду сервоприводу принять некоторое значение параметра. Синтаксис следующий: , где — угол, на который должен повернуться сервопривод.
- — отдаёт команду послать на сервоприводимульс определённой длины, является низкоуровневым аналогом предыдущей команды. Синтаксис следующий: , где — длина импульса в микросекундах.
- — читает текущее значение угла, в котором находится сервопривод. Синтаксис следующий: , возвращается целое значение от 0 до 180.
- — проверка, была ли присоединена переменная к конкретному пину. Синтаксис следующий: , возвращается логическая истина, если переменная была присоединена к какому-либо пину, или ложь в обратном случае.
- — производит действие, обратное действию , то есть отсоединяет переменную от пина, к которому она была приписана. Синтаксис следующий: .
Пример использования библиотеки Servo
- servo_example.ino
-
// подключаем библиотеку для работы с сервоприводами #include // создаём объект для управления сервоприводом Servo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
По аналогии подключим 2 сервопривода
- 2servo_example.ino
-
// подключаем библиотеку для работы с сервоприводами #include // создаём объекты для управления сервоприводами Servo myservo1; Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12); } void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo1.write(); myservo2.write(); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo1.write(180); myservo2.write(180); delay(500); }
Принцип работы
Вентильные электродвигатели
Вентильные двигатели – это синхронные бесколлекторные (бесщёточные) машины. На роторе находятся постоянные магниты из редкоземельных металлов, на статоре — якорная обмотка. Коммутация обмоток статора осуществляется полупроводниковыми силовыми ключами (транзисторами) так, чтобы вектор магнитного поля статора был всегда перпендикулярен вектору магнитного поля ротора — для этого используется датчик положения ротора (датчик Холла или энкодер). Фазный ток регулируется с помощью ШИМ-модуляции и может иметь трапецеидальную или синусоидальную форму.
Линейные серводвигатели
Плоский ротор линейного двигателя сделан из редкоземельных постоянных магнитов. По принципу действия он похож на вентильный двигатель.
Шаговые электродвигатели
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления – их коммутация выполняется внешним приводом.
Рассмотрим принцип работы реактивного шагового двигателя, у которого на полюсах статора расположены зубцы, а ротор выполнен из магнитомягкой стали и тоже имеет зубцы. Зубцы на статоре расположены так, что на одном шаге магнитное сопротивление меньше по продольной оси двигателя, а на другом – по поперечной. Если дискретно возбуждать в определённой последовательности обмотки статора постоянным током, то ротор при каждой коммутации будет поворачиваться на один шаг, равный шагу зубцов на роторе.
Сервопривод
Некоторые модели преобразователей частоты могут работать как со стандартными асинхронными двигателями, так и с серводвигателями. То есть основное отличие сервоприводов не в силовой части, а в алгоритме управления и скорости вычислений. Поскольку в программе используется информация о положении ротора, то у сервопривода есть интерфейс для подключения энкодера, установленного на валу двигателя.
Сервоконтроллер
В сервосистемах используется принцип подчинённого управления: контур тока подчинён контуру скорости, который в свою очередь подчинён контуру положения (см. теорию автоматического управления). Сначала настраивается самый внутренний контур – контур тока, потом – контур скорости и самым последним настраивается контур положения.
Контур тока всегда реализован в сервоприводе.
Контур скорости (как и датчик скорости) также всегда присутствует в сервосистеме, он может быть реализован как на базе встроенного в привод сервоконтроллера, так и внешнего.
Контур положения используется для точного позиционирования (например, осей подач в станках с ЧПУ).
Если в кинематических связях между исполнительным органом (координатным столом) и валом двигателя нет люфтов, то координата косвенно пересчитывается по значению кругового датчика. Если люфты есть, то на исполнительный орган устанавливается дополнительный датчик положения (который подключается к сервоконтроллеру) для прямого измерения координаты.
Дополнительные примеры скетчей
Следующий код позволяет вам контролировать серводвигатель на пине 2 с помощью потенциометра на аналоговом 0.
#include
SoftwareServo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup()
{
myservo.attach(2); // attaches the servo on pin 2 to the servo object
}
void loop()
{
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
SoftwareServo::refresh();
}
Следующий код — это поворот (пинг/понг) на выводе A0 с переменной скоростью.
Устройство сервопривода
Основные детали, из которых состоит типовой серводвигатель – ротор и статор. Для коммутации применяются специальные комплектующие в виде штекеров и клеммных коробок. Управление, контроль и коррекция процессов осуществляется с помощью отдельного управляющего узла. Для включения и выключения сервопривода используется отдельная система. Все детали, помещаются в общем корпусе.
Практически во всех сервоприводах имеется датчик, работающий и отслеживающий определенные параметры, такие как положение, усилие или скорость вращения. С помощью управляющего блока поддерживается автоматический режим необходимых параметров при работе устройства. Выбор того или иного параметра происходит в зависимости от сигналов, поступающих от датчика в установленные промежутки времени.
Их принцип работы заключается в преобразовании электрической энергии в механическую, с помощью электродвигателя. В качестве привода используется редуктор, позволяющий снизить скорость вращения до требуемого значения. В состав данного устройства входят валы с шестернями, преобразующими и передающими крутящий момент.