По способу преобразования энергии, преобразователи частоты делятся на две группы:
— Первая группа: Непосредственные (или одноступенчатые) преобразователи частоты
— Вторая группа: Двух-ступенчатые (или двух-звенные преобразователи частоты) частотные преобразователи
Непосредственные (одноступенчатые) преобразователи частоты
Одноступенчатые преобразователи частоты. Непосредственный тип частотного преобразователя – это реверсивный тиристорный преобразователь.
Преимущества непосредственных (одноступенчатых) преобразователей частоты
— Главное преимущество заключается в том, что одноступенчатый преобразователь частоты подключается напрямую в сеть без дополнительных устройств.
— Простая схемотехника обуславливает минимальный уровень цен на данный тип устройств.
Двух-ступенчатые частотные преобразователи
Преобразователи частоты с двойным преобразованием напряжения (или двух-звенные преобразователи частоты). Принцип действия данных частотных преобразователей основан на двойном преобразовании напряжения. На первом этапе переменный ток из сети, проходя через выпрямитель, преобразуется в постоянный, а затем, поступая в инвертор, преобразуется снова в переменный ток. Учитывая эту конструктивную особенность, приборы такого типа называют иногда — частотными преобразователями со звеном постоянного тока.

Двух-ступенчатые частотные преобразователи, в свою очередь, делятся на два подтипа, различающиеся по типу применяемого в них инвертора:
— Двух-ступенчатые частотные преобразователи созданные на базе АИН (автономный инвертор напряжения)
— Двух-ступенчатые частотные преобразователи созданные на базе АИТ (автономный инвертор тока)
Двойное преобразование тока (или напряжения, в зависимости от схемотехники конкретной модели устройства) позволяет добиться стабилизации характеристик преобразователя в широком диапазоне мощностей, но усложняет схему преобразователя (по сравнения с одноступенчатым преобразователем), что отражается на стоимости прибора.
Схема двух-ступенчатого частотного преобразователя включает выпрямитель и инвертор (АИН или АИТ) — для прямого и обратного преобразования переменного тока или напряжения (в зависимости от типа схемотехники), а также микропроцессоры управления, платы ввода/вывода и сборные IBGT или MOSFET-транзисторы для широтно-импульсной модуляции (ШИМ), которая позволяет стабильно регулировать выходное напряжение без изменения входного напряжения в широком диапазоне нагрузок. Такая схема двойного частотного преобразователя относится к наиболее распространенной среди современных схемотехнических решений, так как использует надежную элементную базу с высоким ресурсом работы, позволяющую снизить себестоимость частотного преобразователя, и, соответственно, его отпускную цену.
Частотные преобразователи — в шкафу управления станка
Частотные преобразователи устанавливаются внутри шкафа управления. Допускается установка частотных преобразователей только в соответствии со стандартами производства шкафов управления оборудованием. На видео показано плавильное размещение частотных преобразователей внутри шкафа управления:
Работа частотного преобразователя с одним электродвигателем предполагает учет следующих величин:
Pn – номинальная мощность электродвигателя (как правило, указывается на шильдике, кВт);
J – приведенный к валу электрического двигателя момент инерции нагрузки (величина Нм2)
В случае, когда вал не связан с инерционными элементами или электродвигатель работает на холостом ходу, приведенный момент инерции приравнивается к моменту инерции ротора электрического двигателя;
n – частота вращения (выражается в об/мин), до которой нужно разогнать электродвигатель за определенное время t;
t – время (секунды) в течение которого нужно разогнать электродвигатель до частоты вращения n;
Un – значение напряжения (В) на обмотках электрического двигателя (номинальные обороты);
k – коэффициент искажения тока на выходе преобразователя; k = 0,95 — 1,05; в ходе расчета предельных величин рекомендуется брать во внимание максимальное значение коэффициента;
η – КПД электродвигателя;
cosφ – эту величину следует взять из спецификации на двигатель, примерное значение будет равно 0,8-0,85
1. Произведем расчет номинального момента на валу двигателя:
2. Расчет пусковой мощности электродвигателя:
3. Опираясь на этот параметр, выбирается рабочая мощность ПЧ, которая должна соответствовать нижеприведенному условию:
4. При этом ток, требуемый электродвигателю при линейном разгоне (величина Id), не должен быть больше пускового тока преобразователя.

5. Выполним расчет полной потребляемой электродвигателем мощности в условиях номинального установившегося режима.
Как осуществляется подключение преобразователя частоты?
Если рассмотреть монтаж преобразователя частоты схематически, то вес процесс сводиться к соединению контактов самого устройства, электродвигателя и управляющего блока-предохранителя. Достаточно соединить провода всех элементом, подключить двигатель к сети и запустить его.
На первый взгляд, ничего сложного в этом нет, но, на самом деле, процедура монтажа имеет некоторые свои нюансы:
Очень важно, чтобы в цепи между самим частотником и источником питания был установлен предохранитель. Он позволит своевременно отключать устройства в случае перепадов напряжения, сохраняя их работоспособность
Примечательно, что при подключении к трехфазной сети, необходимо, чтобы сам предохранитель также был трехфазным, но имел общий рычаг для отключения. Это даст возможность отключать питание сразу на всех фазах даже, если только на одной случилось короткое замыкание или перегрузка. Если преобразователь подключается к однофазной сети, то и предохранитель должен быть однофазным. В данном случае при расчетах необходимо учитывать ток только одной фазы, но умноженный на 3. Всегда стоит помнить, что в инструкции практически к любому преобразователю указаны требования и нормы по его установке. С ними необходимо ознакомиться еще до начала работ.
Фазовые выходы частотного преобразователя подключаются к контактам самого электродвигателя. При этом в зависимости от напряжения частотника обмотки двигателя могут иметь формацию «звезда» или «треугольник». Обычно на корпусе двигателя указано два значения напряжения. Если частотник соответствует меньшему, то обмотки соединяются «звездой», если большему – «треугольником». Вся эта информация обычно пропечатывается в инструкции.
В комплекте практически с каждым преобразователем частоты прилагается выносной пульт управления. Он не является обязательным элементов цепи, ведь на самом устройстве также есть свои элементы управления, но позволяют существенно упростить работу с оборудованием. Пульт можно монтировать на любом расстоянии от частотника. Обычно делается это следующим образом: преобразователи частоты, которые имеют низкую степень защиты располагаются подальше от двигателя, а сам пульт выносится непосредственно к рабочему месту около оборудования.
Не менее важным этапом установки частотного преобразователя является его тестовый запуск. Он осуществляет по следующей схеме:
- После подключения всех элементов системы (предохранитель, панель управления, частотник, двигатель) необходимо перевести рукоять на пульте управления в активное положение на несколько градусов.
- Тумблеры предохранителя переключить в положение «ВКЛ». После этого на частотном преобразователи должны загореться световые индикаторы, которые будут сигнализировать, что оборудование подключено правильно, а двигатель должен начать медленно вращаться.
- Если вал двигателя начал вращаться в другу от нужной сторону, необходимо перепрограммировать сам частотный преобразователь на реверсное движение. Практически все современные устройства поддерживают такую функцию.
- Постепенно передвигайте рукоять управления и следите за работой двигателя – частота вращения вала должна расти по мере того, как вы передвигаете рукоять.
Если при тестовом запуске никаких проблем обнаружено не было, значит, вы сделали все правильно и система может включаться в рабочий процесс.
Методология подбора преобразователя частоты

Применение частотных преобразователей стало настоящим прорывом в области регулируемого электропривода.
Это открытие кардинально изменило подход в проектировании систем электроприводов. Если раньше при проектировании сложных механизмов, где без точного регулирования параметров (скорость, момент) не обойтись, выбирались двигатели постоянного тока — ДПТ, то с появлением преобразователей частоты, так называемые, сервоприводы переменного тока, начали активно вытеснять двигатели постоянного тока из данных систем. Даже в тяговых электроприводах, асинхронный двигатель, с коротко-замкнутым ротором, вытесняет ДПТ последовательного возбуждения. Поэтому выбор частотных преобразователей особенно актуален и востребован.
Выбор и подбор частотного преобразователя — процесс важный и не простой: необходимо учитывать множество параметров, а так же владеть информацией о специфике процессов, которыми будет управлять преобразователь частоты.
Преобразователи частоты управляют всеми режимами электродвигателей, стабилизируют работу, подают электропитание в нужных пропорциях и режимах, в результате достигается требуемая точность в работе сервоприводов, контроль и безопасность в работе.
Как правильно выбрать (подобрать) частотный преобразователь?
Перед выбором подходящего частотного преобразователя требуется уточнить:
Выбор частотного преобразователя (преобразователя частоты), в первую очередь, связан с задачей, которую необходимо выполнить клиенту, а также с типом выбранного двигателя.
Некорректно выбранный преобразователь частоты, может неэффективно управлять электродвигателем или вывести оборудование из строя или повредить его, обеспечивать перерасход электроэнергии или же наоборот, создавать недостаточную мощность электропривода.
Основные аспекты при выборе частотного преобразователя (преобразователя частоты):
1) Тип электродвигателя и его номинальные данные (номинальную мощность,
номинальный ток, напряжение питания, номинальная частота вращения и т. д.);
2) Наличие датчика обратной связи на валу двигателя;
3) Диапазон регулирования, точность поддержания скорости;
В зависимости от желаемой задачи необходимо уточнить:
1) Тип управления и функциональные возможности;
2) Поддерживаемые датчики обратной связи;
3) Поддерживаемые сетевые протоколы (Ethernet, CAN, ModBus и т.д.);
4) Эксплуатационные характеристики (диапазон рабочих температур, тип исполнения, напряжение и частота сети питания и т. д.);
5) Наличие цифровых интерфейсов;
6) Наличие и тип дискретных и аналоговых входов/выходов;
7) Пульты управления, наличие дополнительных модулей (дроссели, фильтры, тормозные резисторы)
8) Тип программного обеспечения для программирования преобразователя с компьютера и язык программирования; и т. д.
При использовании асинхронного двигателя целесообразно установить частотный преобразователь, мощность которого, будет соответствовать мощности двигателя.
Выбирайте преобразователи частоты на ступень выше, чем положено по стандарту, если может возникнуть необходимость в приложении большего крутящего момента или быстрой остановки привода.
Если установлен приспособленный для специализированных задач двигатель, то при подборе следует руководствоваться номинальными токами преобразователя, которые должны быть больше, чем у двигателя
Очень важно произвести правильную настройку устройства из конкретных условий применения в соответствии с руководством пользователя конкретного преобразователя
ГОСТы и ТУ для частотных преобразователей
Собственно, как и любые технические средства, используемые на производственных предприятиях и в оборудовании, частотные преобразователи и требования к ним регламентируются определенной технической базой, а именно следующими документами:
- Правила устройства электроустановок 7-е издание.
- ГОСТ 24607-88 Преобразователи частоты.
- ГОСТ 13109-97 Совместимость технических средств электромагнитная.
- ГОСТ Р 51137-98 Электроприводы регулируемые асинхронные.
- ФЗ 261 Федеральный закон об энергосбережении и энергоэффективности.
- ТР ТС 00_2011 Электромагнитная совместимость технических средств.
- ГОСТ26284-84 — Преобразователи электроэнергии полупроводниковые. Условные обозначения.
- ГОСТ23414-84 — Преобразователи электроэнергии полупроводниковые. Термины и определения.
- ГОСТ 4.139-85 Система показателей качества продукции. Преобразователи электроэнергии полупроводниковые. Номенклатура показателей.
В соответствии с описанными в этих документах требованиями должен осуществлять выбор конкретной модели устройства, а также ее установка и отладка.
Статьи
- Как сэкономить в кризис – преобразователь частоты «Bosch RexRoth» серии Fe
- Обзор частотно-регулируемых приводов.
- Преобразователи частоты Control Techniques обеспечивают быстрый подъем пресса
- Частотные преобразователи Unidrive SP в угольной отрасли
- Частотные преобразователи Control Techniques в пищевой отрасли
- Компания «CAMU» выбирает для точной резки металла многофункциональные преобразователи частоты Unidrive SP
- Производитель лифтовых устройств выбрал преобразователи частоты Unidrive SP
- Преобразователи частоты Unidrive SP в автоматической сварке
- Преобразователи частоты Unidrive SP — в помощь парашютистам
- Условия применения преобразователя частоты KEB COMBIVERT F5-C/G вместо KEB COMBIVERT F5-B
Выпрямитель
Данный компонент предназначен для формирования пульсирующего напряжения в одно- или трехфазных сетях переменного тока. Выпрямители обычно строятся либо на диодах, либо на тиристорах. В первом случае они считаются неуправляемыми, а во втором управляемыми.
- Неуправляемые выпрямители. В их конструкции используется две группы диодов, которые подсоединены к различным клеммам и проводят различные напряжения – положительное и отрицательное. В конечном счете выходное напряжение равняется разности напряжений на этих группах диодов и в математическом выражении имеет следующее значение: 1,35*входное напряжение сети.
- Управляемые выпрямители. В конструкции таких выпрямителей вместо диодов используются тиристоры. На них может подаваться входящий сигнал a, который стимулирует задержку тока, выражаемую в градусах. В случаях, когда значение данного параметра колеблется в пределах 0-90 градусов, тиристоры играют роль выпрямителей, а когда в 90-300 градусов – инвертора. Выходное значение постоянного напряжения составляет: 1,35* входное напряжение сети*cos α.
Интерфейсы частотных преобразователей
В конструкции большинства современных частотных преобразователей имеется целый набор различных интерфейсов, через которые можно осуществлять подключение стороннего оборудования или синхронизировать несколько частотников. Рассмотрим основные входы и выходы, используемые в подобных устройствах:
- Аналоговый вход. Данный интерфейс служит для приема стандартного аналогового сигнала производственного диапазона, который располагается в пределах от 0(4) до 20мА или от 0 до 10В. Через него можно осуществлять регулировку работы частотного преобразователя. Например, минимальная величина аналогового сигнала может сигнализировать устройству о том, что выходная частота, поступающая на двигатель, должна иметь свое минимальное значение и наоборот – максимальная должна соответствовать максимальной.
- Аналоговый выход. Данный выход по своему функционалу аналогичен входу. Только в этом случае он передает информацию о частоте, поступающей на двигатель, через аналоговый сигнал определенной величины, что позволяет контролировать режим работы.
- Дискретный вход. Данный вход способен принимать скачкообразные сигналы. Как и аналоговый вход, он способен изменять параметры. Например, минимальный сигнал может соответствовать мгновенной минимальной выходной частоте преобразователи, а максимальный – максимальной выходной частоте.
- Дискретный выход. Данный выход позволяет выполнять аналогичные входу операции только в обратном порядке.
- RS-485. Данный интерфейс является полноценным входом, который позволяет в полной мере взаимодействовать с преобразователем частот, например, через компьютер. С его использованием можно настраивать рабочие параметры оборудования, отслеживать его состояние и т.д. В интерфейсе RS-485 используется особенный дифференциальный сигнал, который позволяет проводить линии длиной до 120 метров. Таким образом, можно установить преобразователь частот на производственном участке, а управление им осуществлять в командной рубке, удаленной от рабочего пространства.
Кроме того, в частотных преобразователях могут использоваться и другие интерфейсы. Все зависит от конкретной модели устройства и его производителя.
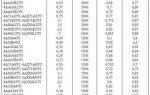
Расчет преобразователя частоты с несколькими параллельно подключенными электродвигателями одинаковой мощности включает следующие показатели:
N – число электродвигателей, параллельно подсоединенных к одному частотному преобразователю, (шт.);
Ns – число одновременно запускаемых электродвигателей, (шт.);
Ks – коэффициент кратности пускового тока, величина равна Md/Mn ;
In – номинальный ток электродвигателя согласно паспортным данным, (А).
1. Расчет полной пусковой мощности:
2. Расчет полного пускового тока:
Полученные данные являются базой для выбора частотного преобразователя, соответствующего следующим условиям:
- При времени разгона менее 60с. Рпч ≥ 1,5Ps, Iпч ≥ 1,5Is;
- При времени разгона более 60с. Рпч ≥ Ps, Iпч ≥ Is.
Способ управления
По этому параметру асинхронный преобразователь частоты может быть скалярным или векторным. Вторые в наше время более распространены, но и стоимость их выше. Главное достоинство векторных частотных преобразователей в их регулировке, которая очень точна. У скалярных частотников простейшее управление, не способное к изменению частот в процессе работы двигателя, а, следовательно, и его скорости. Поэтому оптимальной станет установка подобных устройств на маломощные двигатели, например, вентиляторы. Он вполне обеспечит плавный пуск, минимизирует расход электроэнергии и продлит срок службы двигателя, но это все, на что он способен.
По мощности
Не возникает вопросов в том, что лучше агрегаты с большей мощностью. Хотя для бытового использования подобный показатель не слишком важен, главное, чтобы хватило для двигателя, на который будет устанавливаться приобретаемый частотный преобразователь.
Основное внимание следует обратить на марку агрегата. Идеальным будет вариант приобретения устройства, сделанного именно тем производителем, который выпустил и двигатель
От этого будет зависеть эффективность рабочего тандема. Да и присутствие поблизости фирменного центра обслуживания играет немаловажную роль.
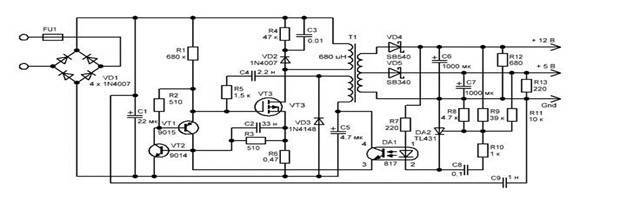
Схема блока питания для частотного преобразователя.
Напряжение в сети
Здесь, конечно же, главный критерий — широта рабочего диапазона напряжений. Все знают, как работает наша электросеть, где перепады временами бывают очень существенными, а потому подумать о безопасности оборудования при подобных неприятностях стоит заранее. Конечно, понижение в сети не доставит больших неприятностей, максимум – отключится частотник для трехфазного электродвигателя, а вот резкое повышение может привести к очень серьезным последствиям. Электролитические конденсаторы, скорее всего, не выдержат и взорвутся, что, естественно, приведет к выходу из строя устройства на долгое время.
Частотная регулировка
В этом вопросе решать придется каждому самому, исходя из области применения частотного преобразователя. К примеру, если частотник пойдет на шлифовальную машину, то, скорее всего, необходимый диапазон регулируемых частот составит 10–100 Гц. Особенность этого параметра в том, что если требуется действительно широкодиапазонный агрегат, то необходимо устройство векторного типа.
Дискретные входы
Для обеспечения формирования необходимой команды с блока управления в частотниках имеются специальные входы, называемые дискретными. Посредством их происходят все рабочие процессы в двигателе, то есть именно они управляют запуском, остановкой, разгоном и торможением, реверсом и т.п. Обратная связь, при помощи которой происходят операции контроля за состоянием и настройки, производится посредством аналоговых входов. По сути, большее количество подобных функций улучшает качество устройства, но в то же время и усложняет его настройки, и увеличивает ценовую категорию.
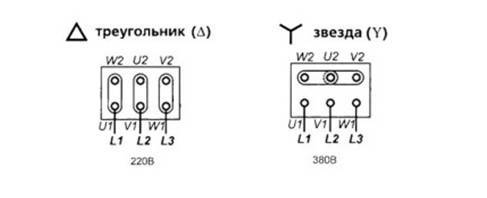
Варианты подключения электродвигателя
Соотношение цены и количества выводов
Конечно, необходимо присутствие выводов, как аналоговых, так и дискретных, без них невозможна работа частотного преобразователя и взаимодействие его с двигателем. К тому же большее их количество обеспечивает и лучшее взаимодействие агрегатов, но ведь и ценовую политику никто не отменял. Сложности в вопросе, как настроить инвертор, не столь существенны, так как при неспособности одного человека их произвести, всегда может найтись тот, кто выполнит подобную работу.
В общем, в этом вопросе каждый сам решает по мере своих финансовых возможностей.
Перегрузки и ШУ
ШУ или шина управления выбирается согласно схеме подключения устройства. Необходимо понимать, что входы и выходы должны быть в равных количествах, но, при этом, оптимальным будет небольшой запас, ведь оборудование, возможно, будет совершенствоваться.
При подборке частотного преобразователя желательно наличие документов по техническим характеристикам двигателя. Агрегат по номиналу должен быть мощнее двигателя как минимум на 10 %. Ну при отсутствии документации, если gпоказатели не известны, конечно, придется «угадывать» параметры приемлемого частотного преобразователя.
Способы контроля
Многие люди, работающие в сфере автоматизации, но не сталкивающиеся вплотную с процессами разработки и внедрения систем электроприводов полагают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса от пульта управления или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, однако есть еще способы управления самим электродвигателем. Именно эти способы и будут оказывать максимальное влияние на производительность всей системы.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существует четыре основных способа управления:
- U/f – вольт на герц;
- U/f с энкодером;
- Векторное управление с разомкнутым контуром;
- Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
Широтно-импульсная модуляция применяется к преобразователю частоты путем использования фиксированного напряжения шины постоянного тока. Транзисторы с изолированным затвором (IGBT) путем быстрого открытия и закрытия (правильней сказать коммутации) генерируют выходные импульсы. Варьируя ширину этих импульсов на выходе получают «синусоиду» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, то ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, которая влияет на форму тока. Все методы управления основываются на ШИМ модуляции. Разница между методами управления заключается лишь в методе вычисления подаваемого напряжения на электродвигатель.
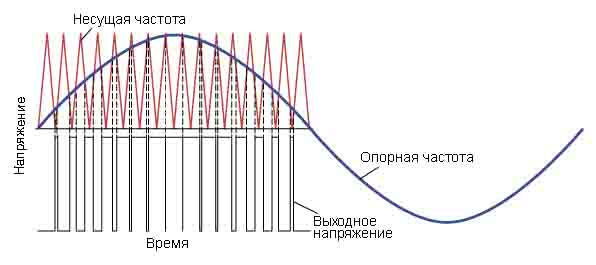
В данном случае несущая частота (показана красным) представляет собой максимальную частоту коммутации транзисторов. Несущая частота для инверторов, как правило, лежит в пределах 2 кГц – 15 кГц. Опорная частота (показана синим) представляет собой сигнал задания выходной частоты. Для инверторов применимых в обычных системах электроприводов, как правило, лежит в пределах 0 Гц – 60 Гц. При накладывании сигналов двух частот друг на друга, будет выдаваться сигнал открывания транзистора (обозначен черным цветом), который подводит силовое напряжение к электродвигателю.
Типы управления частотным преобразователем
Существует два основным метода управления электродвигателями с использованием частотных преобразователей:
- Скалярный.
- Векторный.
Асинхронные системы управления на сегодняшний день считаются самыми распространенными. Они используются в приводах вентиляторов, насосов, компрессоров и т.д. Главный принцип, который лежит в основе скалярного управления, состоит в изменении частоты и амплитуды напряжения по закону U/fn = const, где n всегда больше 1. Соответственно, меняя напряжение U, мы изменяем и частоту f в степени n. При этом степенное значение определяется в зависимости от особенностей самого частотного преобразователя и его назначения.
Сама методика скалярного управления достаточно проста с точки зрения ее технической реализации, но при этом имеет два существенных недостатка. Первый заключается в том, что без дополнительного датчика скорости вы не сможете регулировать скорость вала, ведь она напрямую зависит от нагрузки. Данную проблему можно решить простым приобретение датчика.
Но существует еще один недостаток – невозможность регулировки момента. Казалось бы, данная проблема тоже решается покупкой датчика момента. Но он достаточно дорог, да и само управление получится весьма спорным. К тому же, совместно управлять и скоростью и моментом при скалярном типе управления невозможно.
Векторный тип управления подразумевает, что в саму систему закладывается математическая модель работы электродвигателя, что позволяет на программном уровне по входным параметрам рассчитывать и скорость, и момент. При этом обязательно только наличие датчика, который будет снимать показатели тока фаз статора.
Существует два класса векторных систем управления:
- Без датчиков скорости.
- С датчиками скорости.
Их использование в тех или иных случаях определяется в зависимости от условий эксплуатации двигателя. Если диапазон изменения скорости вращения вала не превышает 1:100, а требования по точности не более 0,5%, то отлично подойдет система без датчиков.
Если же диапазон изменения скорости составляет 1:1000, а требования по точности установлены на уровне до 0,02%, то лучше использовать системы управления с датчиками.
Стоит отметить, что у векторного управления также есть свои недостатки. Например, для их настройки требуются большие вычислительные мощности и знание рабочих параметров двигателей. Кроме того, векторное управление не может использоваться там, где в преобразователю частот подключено сразу несколько рабочих агрегатов – там целесообразно применять скалярные системы.