Определение величины скольжения электродвигателя
Предопределяющим моментом в прямой зависимости от скольжения является начальное значение того момента, когда электродвигатель остается еще в неподвижном состоянии. Максимальное значение скольжения называется критическим.
Конкретные расчеты производят специалисты завода-изготовителя, и они указаны в соответствующих технических характеристиках, прилагаемых к электродвигателю при покупке. При увеличении активного сопротивления только ротора увеличивается значение критического скольжения и уменьшается скорость вращения вала. Изменить данные параметры можно путем использования дополнительного сопротивления, которое вводится в цепь обмотки ротора.
Критическое скольжение
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Регулирование частоты вращения асинхронных двигателей
Частота вращения
асинхронного двигателя
n = n
1
(1
– s) = (60f
1
/p)
(1-s)
(85)
Из этого выражения
видно, что ее можно регулировать, изменяя
частоту f
1
питающего
напряжения, число пар полюсов р
и
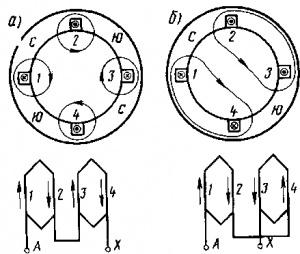 Рис.
Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а — при четырех полюсах; б —
при двух полюсах
скольжение s.
Последнее при заданных значениях момента
на валу М вн и
частоты f 1 можно
изменять путем включения в цепь обмотки
ротора реостата.
Регулирование
путем изменения числа пар полюсов.
Этот
способ позволяет получить ступенчатое
изменение частоты вращения. Для этой
цели отдельные катушки 1, 2 и 3, 4, составляющие
одну фазу (рис. 266), переключаются так,
чтобы изменялось соответствующим
образом направление тока в них (например,
с последовательного согласного соединения
на встречное). При согласном включении
катушек (рис. 266, а) число полюсов равно
четырем, при встречном включении (рис.
266, б) — двум. Катушки двух других фаз,
сдвинутые в пространстве на 120°,
соединяются таким же образом. Такое же
уменьшение числа полюсов можно осуществить
при переключении катушек с последовательного
на параллельное соединение. При изменении
числа полюсов изменяется частота
вращения n 1 магнитного
поля двигателя, а следовательно, и
частота вращения n его ротора. Если нужно
иметь три или четыре частоты вращения
n 1 ,
то на статоре располагают еще одну
обмотку, при переключении которой можно
получить еще две частоты. Существуют
двигатели, которые обеспечивают изменение
частоты вращения n 1 при
постоянном наибольшем моменте или при
приблизительно постоянной мощности
(рис. 267).
В
асинхронном двигателе число полюсов
ротора должно быть равно числу полюсов
статора. В короткозамкнутом роторе это
условие выполняется автоматически и
при переключении обмотки статора никаких
изменений в обмотке ротора выполнять
не требуется.
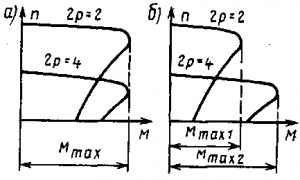 Рис.
Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
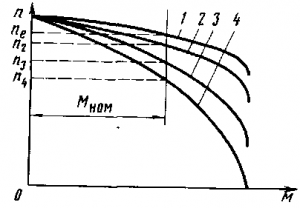 Рис.
Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
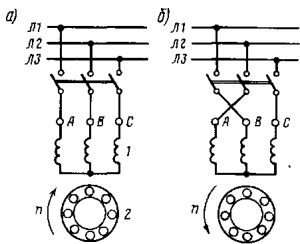 Рис.
Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
Генераторный режим
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой n>n1{\displaystyle n>n_{1}}, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне −∞s{\displaystyle -\infty , то есть оно может принимать любые отрицательные значения.



